
Javier Isabel
2.3K posts

Javier Isabel retweetledi

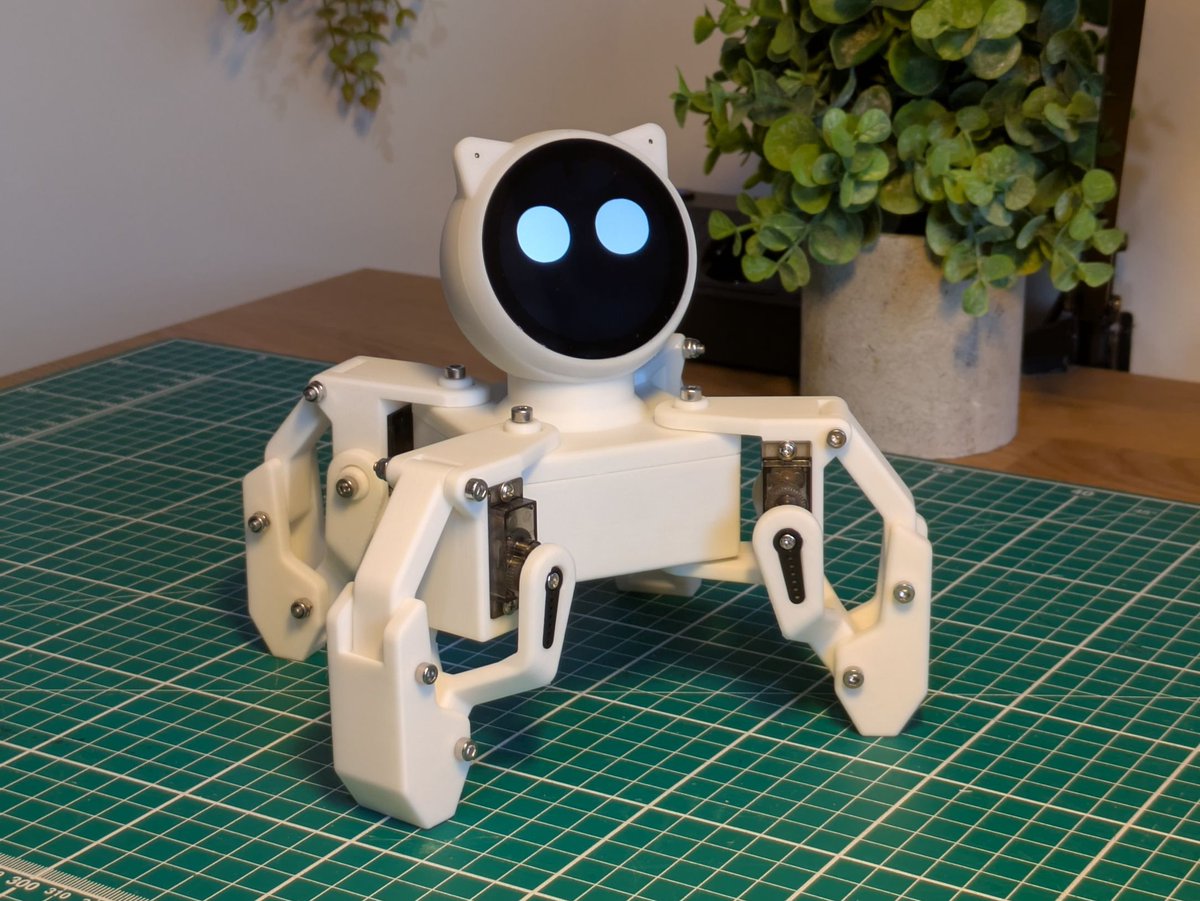
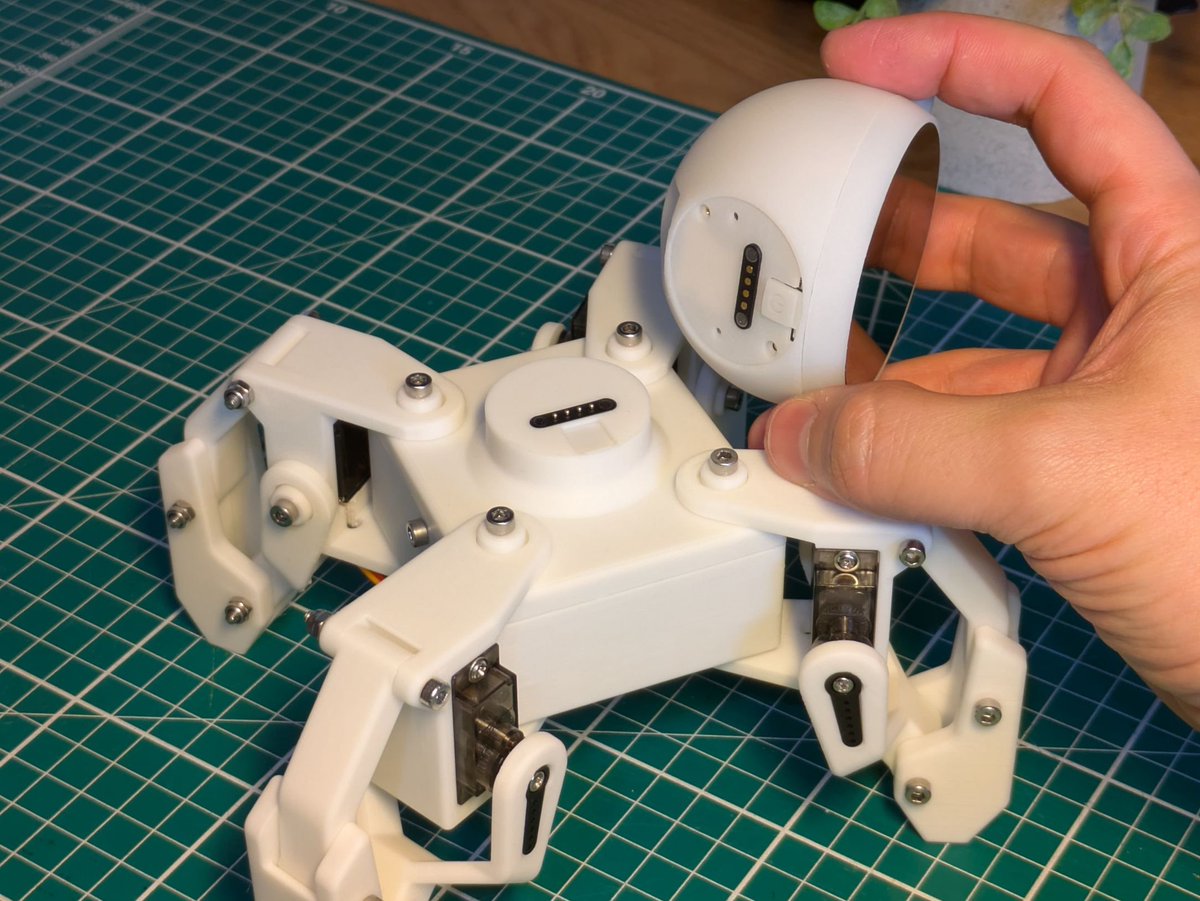
🤖 EchoEar × Kame32 Concept • STL files
➡️ Download 3D print model: cults3d.com/:3673074
💡 Designed by @javierih
#3DPrinting #3DPrinter #Printable #STLfile

English
Javier Isabel retweetledi

Nice work on your robot! I really appreciate what you’ve built. Since it’s based on my MiniKame design (released as open source under CC BY-SA), please keep the same license. Your derivative should also be CC BY-SA, not CC BY-NC-SA. Thanks!!! @digikey
Jorvon Moss_Odd_Jayy@Odd_Jayy
Just here to announce my Comet Crawler v1. Is now open source. #maker #robot digikey.com/en/maker/proje…
English
Javier Isabel retweetledi

@TurielJorge Independientemente de eso, te esta quedando genial!! Animo con el resto del montaje 😃
Español
Javier Isabel retweetledi

@TurielJorge Veo que los horns de los servos son más pequeños que el agujero. Me estoy rompiendo un poco la cabeza porque he visto que hay muchas variantes diferentes de SG90. Entiendo que no son los del link del BOM, podrías medir el largo? Me gustaría publicar piezas para diferentes modelos
Español
Javier Isabel retweetledi


Javier Isabel retweetledi
Los Pcbs del proyecto robot #kame32 de @JavierIH fabricados por @PCBWayOfficial ya están en casa.
👇🏻
javierih.com/robots/kame32/
👇🏻
pcbway.com/project/sharep…
Tan eficientes como siempre 👏🏻👏🏻👏🏻

Español
@HacktronicsIn I understand your point of view, but I like the GPL because it makes free everything it touches. So, I'm afraid I'm not really interested.
English

@JavierIH Copying a simple servo movement function creates licensing issues. I have my own connection logic using web sockets or BLE, GPL pollutes everything, your 3D design is already permissive, why restrict simple servo functions under GPL. Consider MIT, so that more people can adopt.
English
Tuning Kame32's gait in real time by tweaking oscillators parameters on the fly. I'm using the web joystick input to modulate them proportionally.
English
@HacktronicsIn I think it depends on the servo model. Right now, I’m using 2x3A because a single 3A one wasn’t enough. I also tried this one 6V 5A: es.aliexpress.com/item/400049687… but it didn’t handle current peaks well.
English
@HacktronicsIn Hi! I used two DC-DC converters because I couldn’t find a single one that could provide enough current and still fit the available PCB space. For the 3x3 headers, there are links on my website.
About the license, why would you want me to do that? I really like the GPL 🙃
English
@JavierIH Why you need 2 DC-DC? Is there any chance you can move the code under MIT, instead of GPL. Also 3x3 headers are difficult to source, I was thinking of designing a new PCB and writing new code, with API separation removing HTML from ESP32, using web sockets.
English
@Obijuan_cube Gracias!! Me falta aún meter el eje horizontal del joystick para los giros, pero lo voy sacando a ratitos 😊
Español

By the way, did you know you can MAKE your own flutes online using an open‑source JavaScript library? 🤯 Check it out: unityrobot.github.io/Flutomat/

Javier Isabel@JavierIH
Kametroneme 😐
English
Español
@JavierIH @javacasm Genial, yo estoy iniciándome en esto y el tema de los osciladores voy a tener que darle unas vueltas 😁. He encontrado esta web que parece que lo explica bastante bien 👇🏻👇🏻 oberschweiber.com/2020/03/06/min…
¿Alguna recomendación? Gracias
Español
Just published a quick guide on how to assemble the Kame32 PCB. If you ever plan to build this robot, this might come in handy!
Check it out on my website: javierih.com/aux/kame32-pcb/

English