Sabitlenmiş Tweet

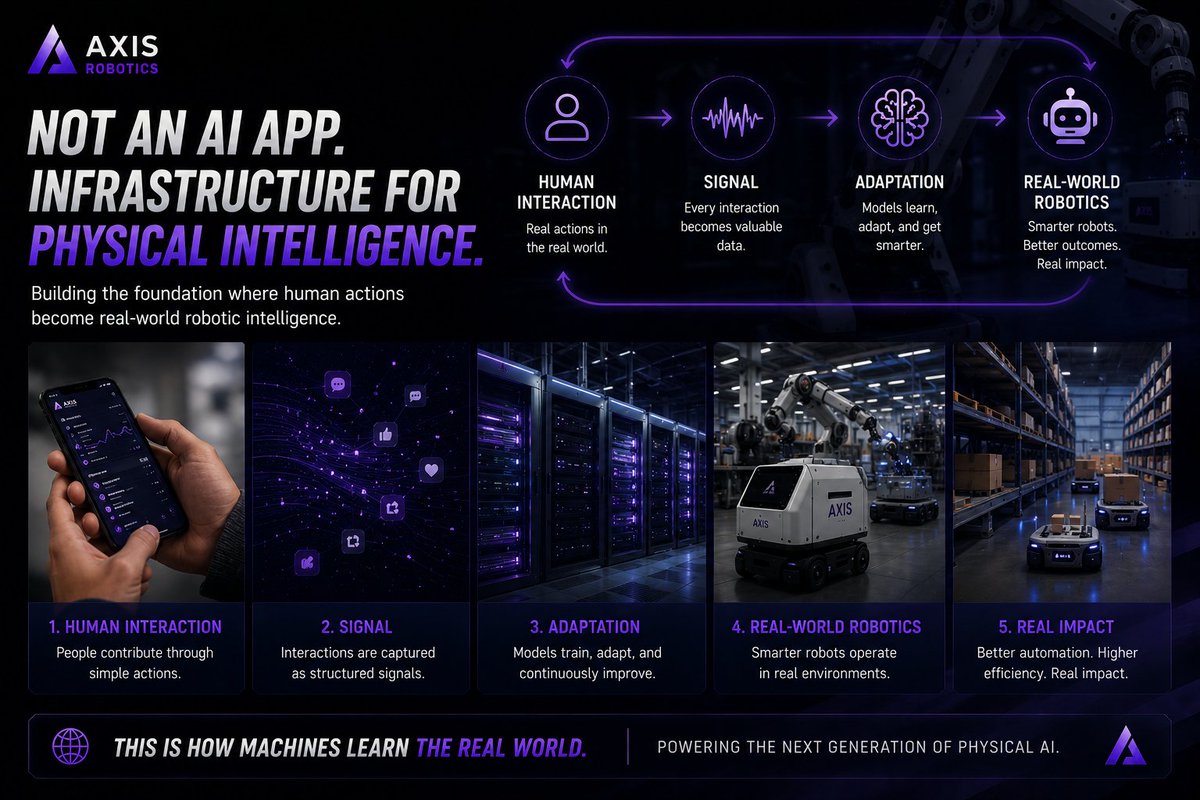
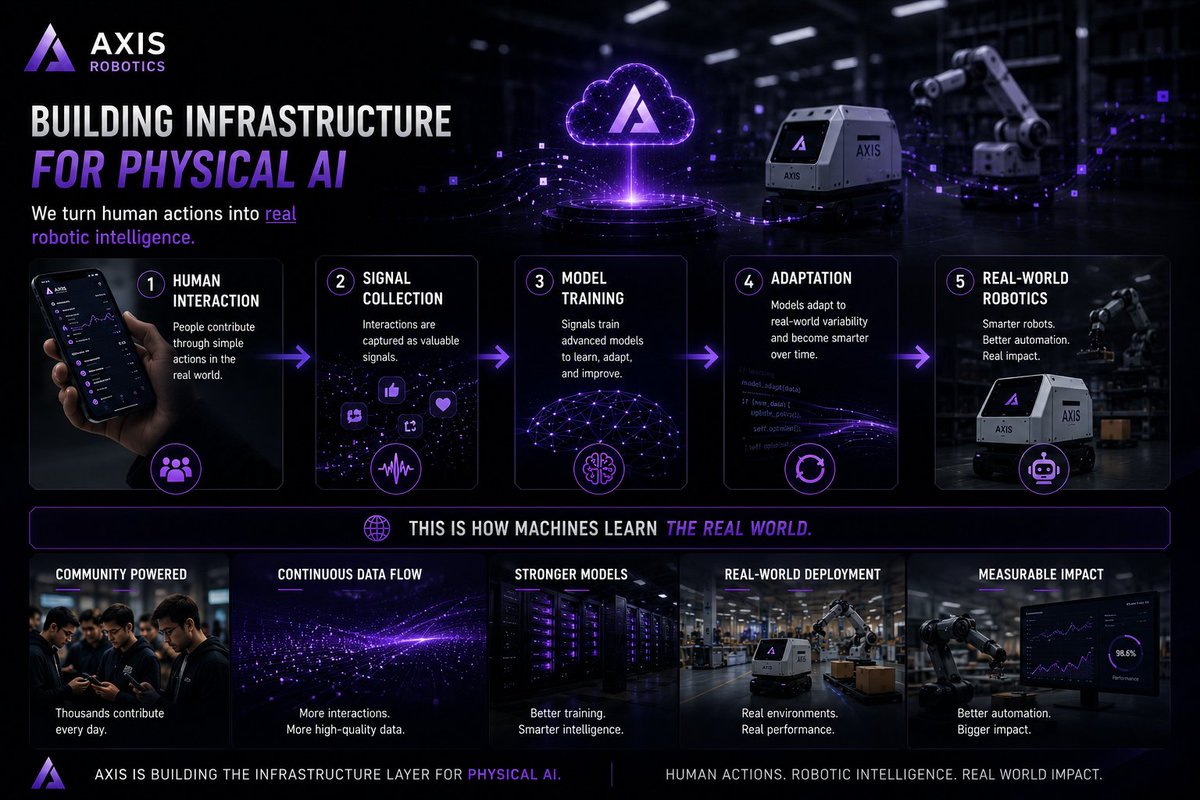
axis is creating the infrastructure that physical ai actually needs. human interactions become signals, signals become training data, and training data
improves robotics in the real world. this is how intelligent machines learn beyond simulations.
@axisrobotics
English