Sabitlenmiş Tweet

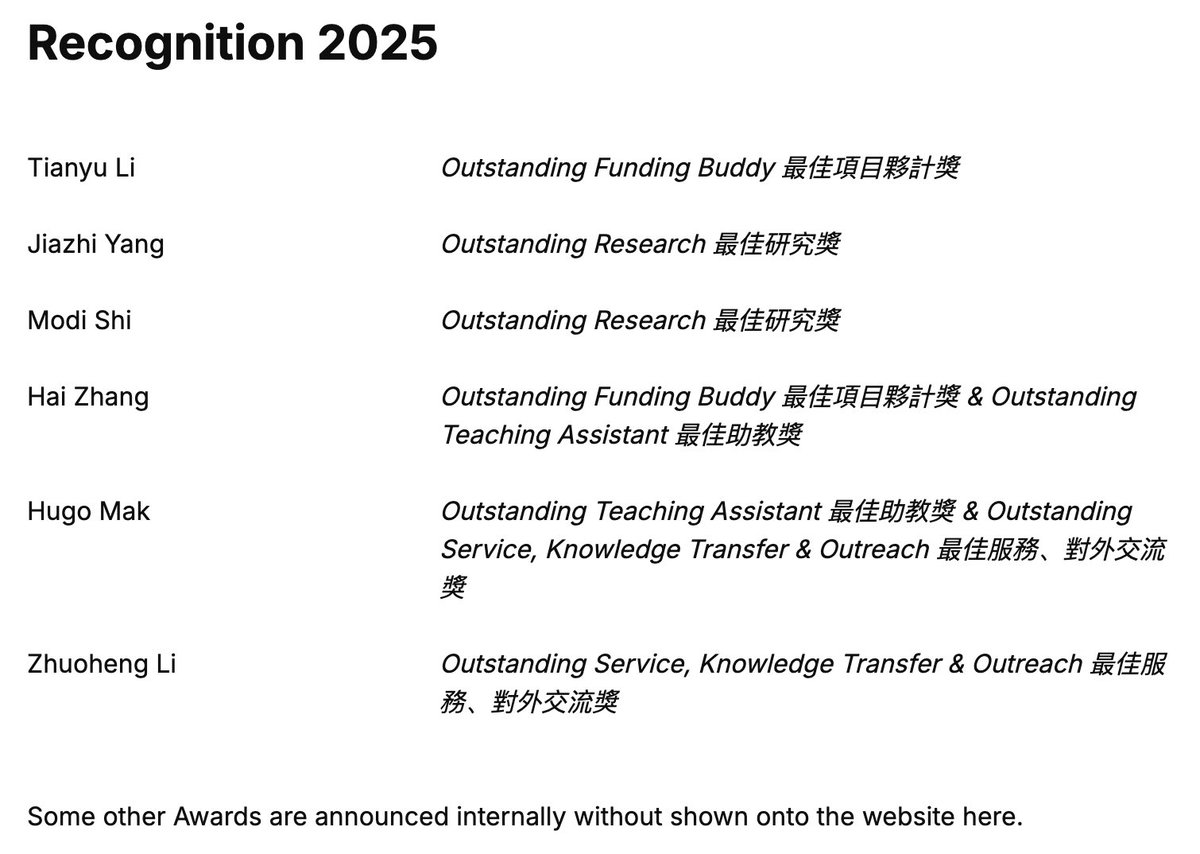
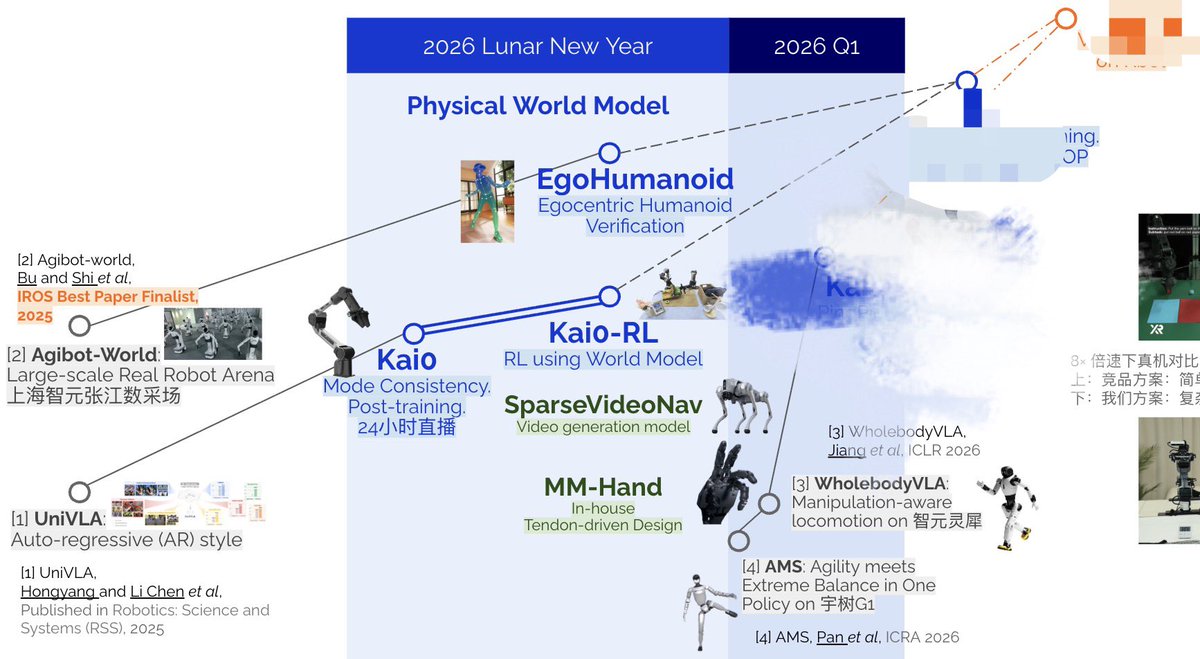
📣 #Recognition #ResearchAward As we usher in the Year of Horse, our team recognizes outstanding members from the past year in the exceptional contribution of areas. Congratulations!!! Let’s rock ‘n’ roll in 2026 🕶️🍾🎆🥂#opendrivelab


English