Tianyu Li retweetledi

#WorldEngine is one of the most exciting projects in AD in the past years!
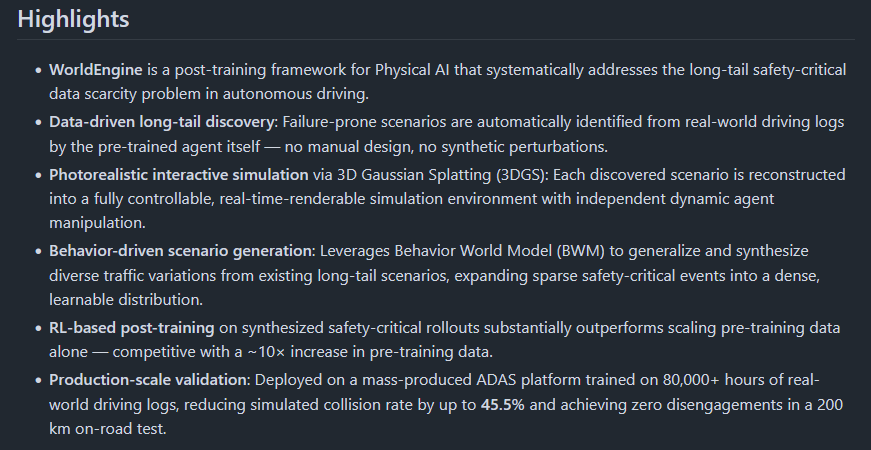
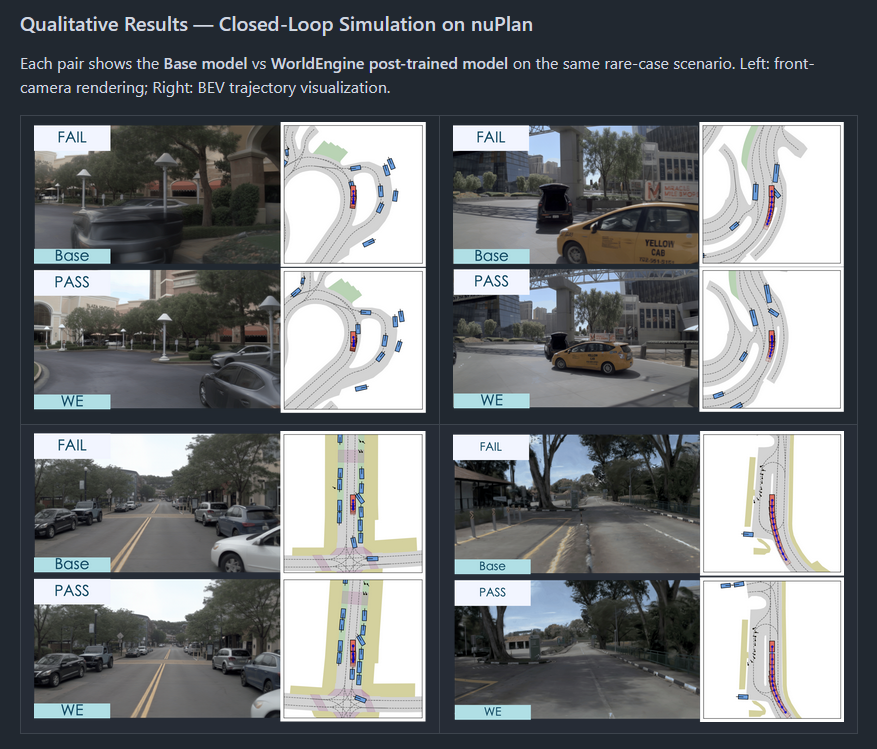
It's a post-training framework tackling the scarcity of long-tail safety-critical scenarios by: mining -> 3DGS reconstruction and dynamic agents control w/ behavior world models -> RL post-training.

Hongyang Li@francislee2020
Introducing #WorldEngine, github.com/OpenDriveLab/W…, a two-year long project. The missing infrastructure for Physical AI post-training in Autonomous driving. Open-source. Production-validated.
English