Sabitlenmiş Tweet

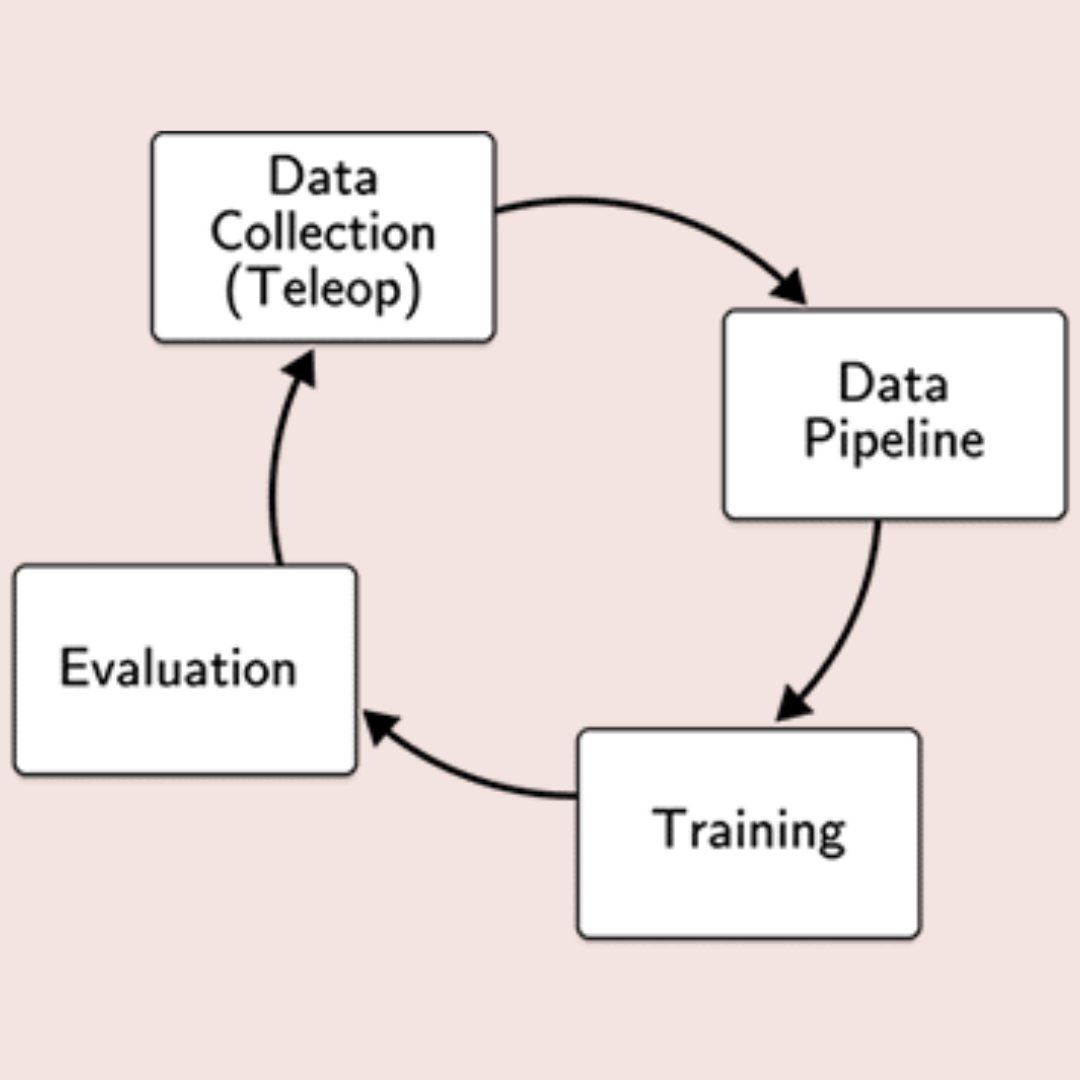
We are exciting to share our #AGI system, #CYBER, A General Robotic Operation System for Embodied AI traing, eval and employ. Parallely, we also released more than 150h human data operation on #huggingface for world model and action model training.
github.com/CyberOrigin207…

English