
Tom Jacobs
6.5K posts

I can’t wait until there are cuter robots out in the world. no offense, just tired of seeing G1 doing things. it’s boring, design is bad, it’s never looked cool even once imo. I don’t go to any “robot” events with G1 unless it’s a fight
Oana Olteanu@oanaolt
A few friends are hosting a rooftop party tonight, we’ll have a DJ Robot Feel free to join us: engineers, investors, founders and some beauty/fashion girlfriends - luma below 👇
English
English

Scott (@GoingBallistic5) is like the Michael Jordan of Humanoid mechanical design, manufacturing simulation and robot offline programming
He’s founded and sold 2 companies in the industry
We are incredible grateful to have him on our team at @RoboStrategy
RoboStrategy@RoboStrategy
BREAKING: Robotics Research Diligence Director (R2D2) Scott Walter, PhD (@goingballistic5) has been signed by RoboStrategy
English

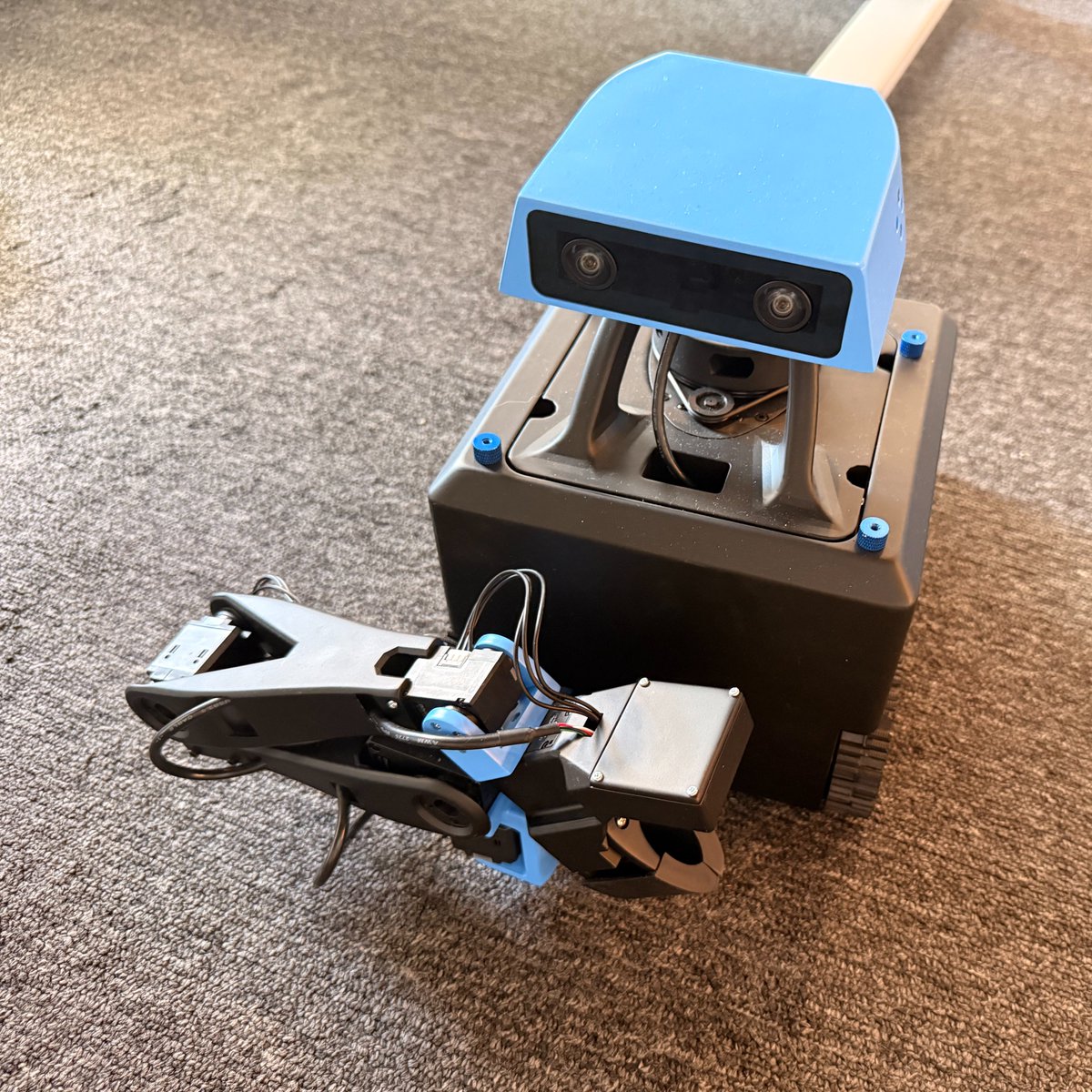
We built a bipedal robot for about $2,500.
A real, mostly 3D-printed robot you can build, repair, simulate, train, and control.
Today we’re releasing LeRobot Humanoid: an open robot-learning platform with hardware, runtime, identification tools, and training environments.
Blog post: huggingface.co/blog/VirgileBa…
Repo: github.com/Virgileboat/le…
English
Tom Jacobs retweetledi

@selim___1903 @aiDotEngineer You’re in the bay area or singapore?
English

We built a humanoid robot from scratch in 3 months, got 100+ pre-orders in weeks, and tomorrow I’m talking about how we see robotics at @aiDotEngineer. Come through. Let’s talk agent-based robotics.
English

Uber's 16th birthday coming up ...
thinking about a "summit" for the OG's... any ideas? who'd be down to show up?!
startDate < 9/2015
X^x^x ... iykyk
🤔🚘🥳 #UberGetsItsDriversLicense
Location poll...
English
@sama be less like a buzzfeed article at the end and don’t ask the next suggestion
English

@theallinpod @altcap @elonmusk EWS? Don’t you mean SpacEX Compute Services (SECS)?
SECS is powerful.
English

“There's nobody better on planet Earth than Elon at converting electrons to tokens. He was building EWS all along.” - Brad Gerstner on how becoming a hyperscaler impacts SpaceX’s outlook
@altcap on @elonmusk's cloud strategy:
“It's a critically important evolution to the story.
SpaceX has this five-layer cake: launch, connectivity, compute, hyperscalers, space datacenters, and then applications and models, and then other bets.
And now we see the ace card that Elon's playing. He was building EWS all along, and so I estimate that this is going to generate, in this year, an incremental $4 to $5B of revenue on top of what analysts estimate is in the mid-20s.
That's a material amount of incremental revenue to offset the cost of the investments that he's made here, and that will subsidize, to Chamath's point, all that he's investing to build the next generation of Grok.
Remember, too, that he has three facilities, Colossus, Macro Hard, and Macro Harder. 1.2 gigawatts in Macro Hard and Macro Harder in Blackwell.
So he's given the one that's kind of less connected, H100's great for inference, to Anthropic. He's monetizing it in a big way.
It's terrific for Anthropic, and it solves what I think was the biggest question in the valuation story, which is what if he spends ahead of xAI's revenue?
It takes the pressure off xAI delivering immediate revenue. Now he becomes an immediate competitor in the hyperscalers. I don't think this is the last announcement.
And I would just say finally, everybody has talked about how we don't have enough power, how we don't have enough compute, how the revenues would not show up this year, but the chaos that is American capitalism somehow finds a way.”
English

Wild things happening in San Francisco this evening
English




@aaronistan @bySyncere yes please, we’re back in palo alto in May
English
We just did a private demo of Lume for Jeff Bezos, Will I Am, Dario Amodei, and more.
The progress over the past six months has been incredible.
The @bySyncere team is so excited to launch this week.



English