
ahad
966 posts

ahad
@ahadj0
building autonomous robots | prev @aws @amazon
Katılım Ekim 2022
172 Takip Edilen846 Takipçiler

Why can't “world models” just be sim? A real-time real2sim demo in the upcoming “ManiDreams”
Foundation Stereo + SAM2 + Newton
= Generalizable 3D physics prediction in a fast (15FPS) and lightweight (3070) way.
No data or object mesh needed
rice-robotpi-lab.github.io/ManiDreams/
English
ahad retweetledi

We noticed that DINOv3 was surprisingly strong at matching object features.
This inspired L2G (Local Matches to Global Masks). With a few reference images, a robot can search a room for the target object.
🔗 Project: irvlutd.github.io/L2G/
💻 Code: github.com/IRVLUTD/L2G
Yu Xiang@YuXiang_IRVL
DINOv3 seems very good at matching objects across environments as well
English
@chris_j_paxton it interesting to see the difference of public funding and private funding for ai research
English

I do increasingly think that open-source ai is of fundamental importance to human liberty, and it's worrying how under-emphasized it is outside of, like, literally just AI2
English
@PrathamJainAI so, when I trained the reward model on the wrist view it actually was having a pretty hard time fitting the data
English

@ahadj0 For my setup I use 3 cams one at top one at the wrist of the robot and third front view
English
looks like training on high camera didn't impact the fitting
looks like i need more data diversity and maybe some failure demos in the dataset
here's visualization of reward model on an automous rollout (not trained with reward model)
ahad@ahadj0
interesting to see which camera view fits the best for a reward model trained on 26 mins of data this is inference on a demo in the training set
English
@ahadj0 Try another camera and add it in front view and let magic happen
English
@PrathamJainAI interesting observation maybe including more lighting could make it robust to this.
did you see some correlation between shadows and predicted value?
English
@ahadj0 You also have bad lighting avoid shadows formation this creates confusion in the model
English

@ahadj0 Curious to see the impact of removing the wrist view. Any initial results to share?
English
@dappsidesanchez seems like the wrist views were actually getting in the way
so trying to train the reward model without the wrist view and going to try training a policy with it
English

@ahadj0 Can’t wait to see how the view affects long term training. keep em comin!
English

@ahadj0 nice! was this your idea? planning on open sourcing it?
English
@RealJoshuaYang @PrathamJainAI i was doing inference on a single 4090. with 2 wrist cameras and a high and low camera
English

@ahadj0 @PrathamJainAI Sorry, I meant for your original diffusion policy tweet.
English
diffusion policy with training time rtc trained on 26 minutes of data
i think i need a more stable table
ahad@ahadj0
diffusion policy trained on 26 minutes of data (80 demos, 20 seconds each) using DDIM noise scheduler for inference with 10 denoising steps
English
@RealJoshuaYang @PrathamJainAI i'm not the author of that tweet so i can't really answer for them
but in my experience using so 101 arms you would need a third person camera + wrist camera
English
@ahadj0 @PrathamJainAI Hmm ok I have a 3090 locally, what hardware are using for inference in that video? Also is your setup wrist camera + birds eye camera?
English
@chris_j_paxton also something to note when ever your record anything with lerobot (huggingface's robot) library they by default upload it
English
The robotics data wall is falling
Pierre-Alexandre Balland@pa_balland
Something big is happening in robotics - and it’s hiding in plain sight. This post is not about dancing robots but in the data that powers them. Open robotics datasets have exploded this year, turning the field into a more scalable and collaborative ecosystem. In just two years, @huggingface datasets grew from 11k to over 600k - and robotics is by far the fastest-growing segment. We went from 1k robotics datasets in 2024 to 27k in 2025! For comparison, text generation, the second-largest category, has only around 5k datasets in 2025. That gap is massive. Open datasets are important because robotics lives and dies by real-world robot data - video, actions, sensors, failures. By making this data easy to upload, reuse, and benchmark, researchers, startups, and large players are now releasing real-robot datasets that would have stayed locked inside labs just a few years ago. Major contributors include @nvidia, LeRobot initiative, and a rapidly growing maker community. This surge is also enabled by cheaper video storage, better tooling, and an open-source AI culture now spilling into the physical world. And it really matters: open robotics data dramatically lowers entry barriers, accelerates learning-by-doing, and speeds up progress toward generalist and humanoid robots. Robotics won’t scale through hardware alone - but to a large extent through shared data. Viz below from @aiworld_eu - link to the story and more viz/filters in comment.
English
@RealJoshuaYang @PrathamJainAI the main bottleneck with diffusion policy is inference speed
not really the robot itself
English
@ahadj0 @PrathamJainAI By the way, do you think diffusion policy would be feasible on the SO Arm 101 arms? What arms are you using in the video?
English
@PrathamJainAI @ahadj0 Is this Diffusion Policy? How many examples did you need?
English
@kamalgupta09 The way the PI 0.5 paper described it, they trained their VLM backbone on a mixture of discrete action tokens and multimodal web data.
English

Had a few of conversations during NeurIPS where the researcher think of VLAs as VLMs whose autoregressive head is fine-tuned to output actions tokens. Is that the generally accepted definition?
I always thought of them as any model trained from mixture of data that has understanding of vision, language, and actions (irrespective of whether or not if it’s autoregressive, or if it has internet pretraining)
English
@eddybuild @neurosp1ke i don't they are using wrist cams in the post you referenced
English

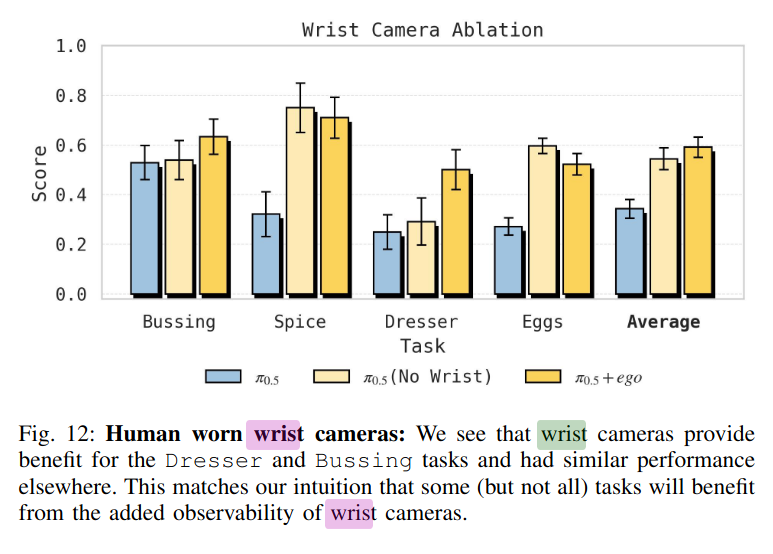
"changes everything" ablated by PI ;-) - seems yes, wrist cams are overall nice to have but not all tasks benefit...
English
@d_ol_an @LeRobotHF You don't need 2 so 100 robots you can get away with 1 if you use some other way of teleoping but it is similar if you use 1 so100 follower and 1 leader
English
