Antioch is bringing agentic development to physical autonomy.
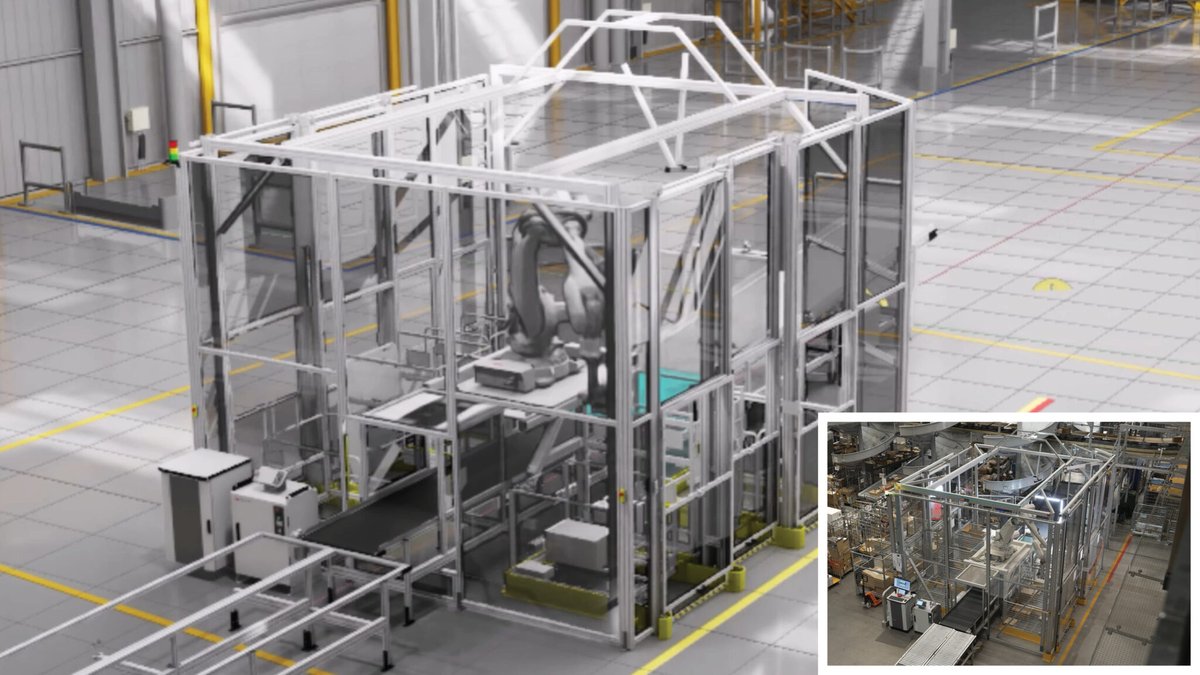
The next wave of AI will transform physical industry — manufacturing, logistics, construction — the way LLMs have changed knowledge work. To unlock this shift, every autonomy team needs the same closed-loop, agentic development infrastructure that tools like Cursor have brought to software.
Last week, we announced Antioch’s $8.5M seed raise to build this.
Read about the full vision, the team behind it, and what’s next: antioch.com/blog/seed/
English