Zhiyang (Frank) Dou@frankzydou
Introducing ✨RigidFormer: Learning Rigid Dynamics with Transformers - our attempt to scale learning-based physical dynamics with Transformers.
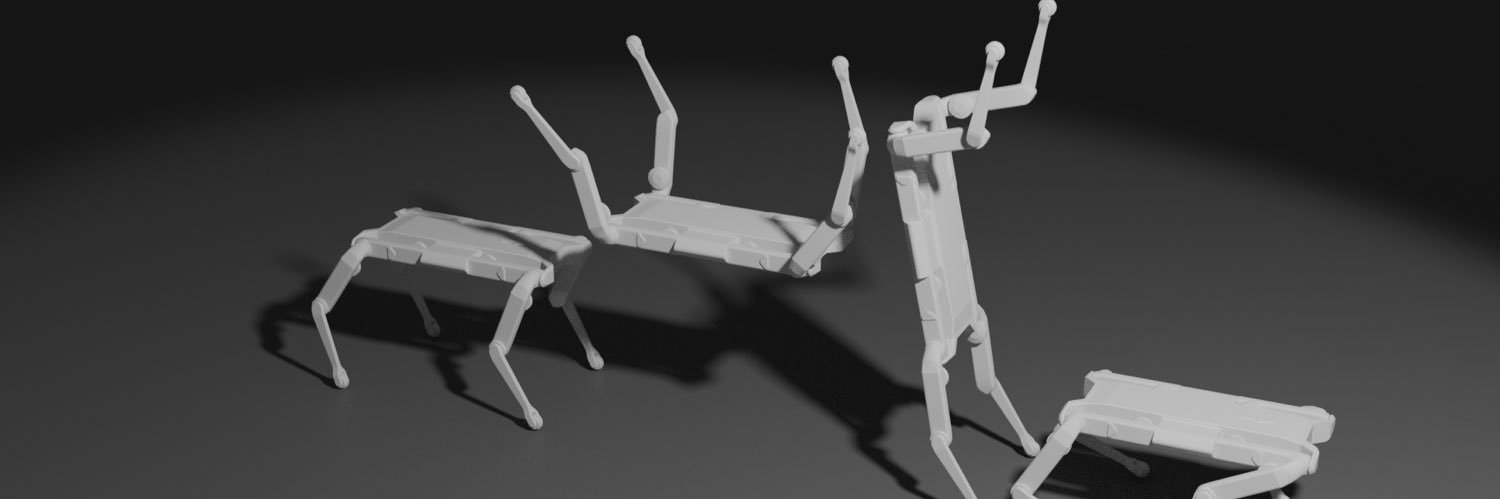
RigidFormer learns rigid dynamics with Transformers. It is a mesh-free, object-centric Transformer for multi-object rigid-body contact dynamics from point clouds.
Learning physics with purely neural simulators, without relying on traditional physics engines, is an important and widely studied problem. Prior SOTA methods often use graph neural networks for accuracy and generalization, but still struggle with efficient, high-fidelity simulation at scale.
RigidFormer uses only point inputs, matches or outperforms mesh-based baselines on standard benchmarks, runs much faster, generalizes across point resolutions and datasets, and scales to 200+ objects. We also show a preliminary extension to command-conditioned articulated bodies by treating body parts as interacting object-level components.
RigidFormer is mesh-free: it does not require mesh connectivity, SDFs, or vertex-level message passing, making it well-suited for point-cloud observations and scalable simulation.
This architecture can also be adapted to learn soft-body dynamics by replacing the rigid-body module (differentiable Kabsch alignment).
🎬See our video for more details.
Many thanks to my amazing collaborators: Minghao Guo @GuoMh14, Haixu Wu @Haixu_Wu_1998, Doug Roble, Tuur Stuyck @TuurStuyck, and Wojciech Matusik @wojmatusik.
Project page: people.csail.mit.edu/frankzydou/pro…
Paper: people.csail.mit.edu/frankzydou/pro…