Darius Foodeei retweetledi

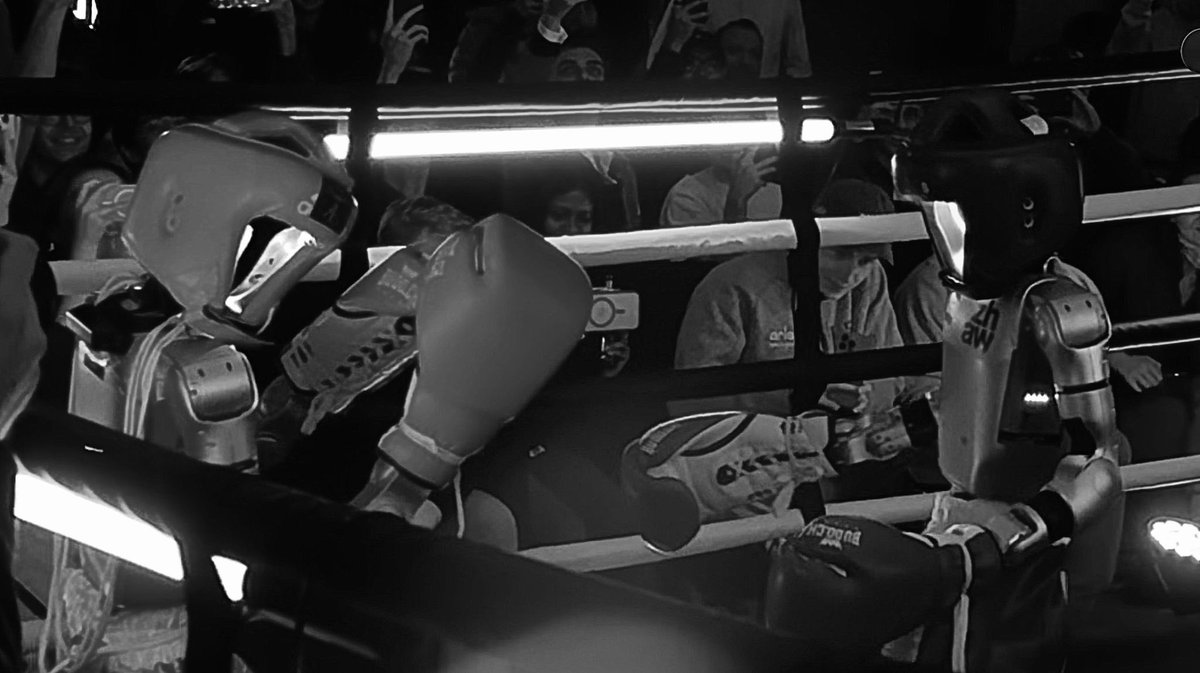
A student in Zurich sleeps in a camper van outside a hangar every night. Just to have more hours to build a humanoid robot. He’s obsessive. He's not alone. 2,500 students across Europe are getting into robotics right now.
And now they united and just launched: ESRA, the European Student Robotics Association. 🇪🇺🦾
They are bringing together highly talented young people, give them space, give them resources and let them build. By now already 13 robotics clubs. 8 countries. 2,500+ students.
I visited several of them over the last weeks to get to know them and let them tell their stories. We've also been helping behind the scenes where we can, because this is exactly what Europe needs.
Several multiple billion dollar companies will come out of the ESRA network. Right here in Europe.
If the Bay Area had a student robotics network like this, they would never shut up about it.
Time we do the same. 😤🔥🇪🇺
It only needs a few crazy ones to fix a continent. Turns out they're already building. 🇪🇺
English