Eigenλime
424 posts

Eigenλime
@eigentime5454
David Goggin' my way to new shit.


Unitree G1 has improved a lot this year. And DeepSeek R1 was released Jan this year - feels like 5 years ago. The acceleration is overwhelming.



Robots have a long way to go vs humans. Seen at @BitRobotNetwork booth at #CoRL2025


Our whitepaper on Isaac Lab is out! Isaac Lab is a natural successor of Isaac Gym that pioneered GPU-accelerated simulation for robotics. It subsumes all the features of Gym and provides the latest advances in simulation technology to robotics researchers. It also supports warp-based custom sensors, actuator models, motion generation pipelines, teleoperation devices, and various ready to use environments for sim-to-real research for locomotion, manipulation, navigation and more.

Efficient training of neural networks is difficult. Our second Connectionism post introduces Modular Manifolds, a theoretical step toward more stable and performant training by co-designing neural net optimizers with manifold constraints on weight matrices. thinkingmachines.ai/blog/modular-m… We explore a fundamental understanding of the geometry of neural network optimization.










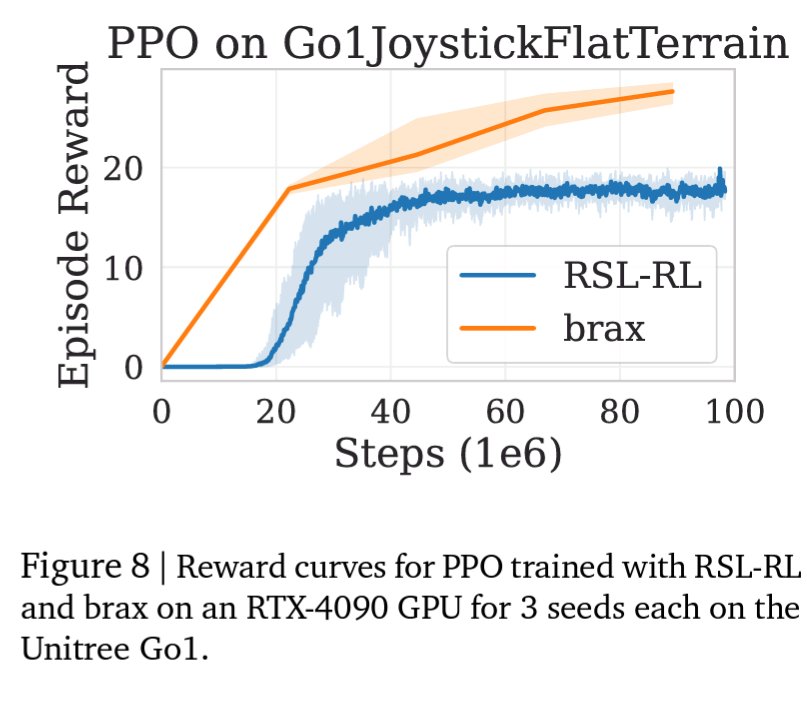
Excited to announce playground.mujoco.org: an open-source library for GPU-accelerated robot learning and sim-to-real transfer. Playground contains a whole host of robot learning environments, many of which were used to transfer policies onto real robots! I'd like to highlight a few particular features of this release 👇