Eugene
85 posts

This is a project we’ve been working on for a long time, and today we’re incredibly excited to share ComFree-Sim — a GPU-parallelized ANALYTICAL contact physics engine built to be lightweight for faster, scalable, dense-contact simulation. It’s a drop-in alternative to MuJoCo (same API) that skips iterative solves to keep dense-contact compute flat. 👇
⚡ >2× higher throughput in dense-contact scenes vs. MuJoCo Warp
🎯 Comparable, highly tunable contact dynamics fidelity
🤖 Low-latency sim-predictive control for dexterous manipulation, humanoids, and more
Faster, learnable physics unlocks more for closed-loop physical intelligence.
Website, paper, and videos: irislab.tech/comfree-sim/ 🚀
⏳ ComFree Warp drops this weekend. ComFree Jax coming soon!
#Robotics #EmbodiedAI #Simulation #PhysicsEngine #DexterousManipulation #Humanoids #MuJoCo #GPU
English
@kalinowski007 Congratulations and huge respect for having the courage to stand by your principles. You're an example to others. You won't regret it!
English

I resigned from OpenAI. I care deeply about the Robotics team and the work we built together. This wasn’t an easy call. AI has an important role in national security. But surveillance of Americans without judicial oversight and lethal autonomy without human authorization are lines that deserved more deliberation than they got. This was about principle, not people. I have deep respect for Sam and the team, and I’m proud of what we built together.
English

The full video of hand and glove co-design in action.
For hand 🖐️ we try to make sure it's able to repeat what a human hand can do; hyperextension in the index finger is a great example here. Most robotic hands lack that, and it is very important for grasping objects securely. Let’s try to close the embodiment gap.
For glove 🧤 we try to make sure it’s comfortable to wear, while also has same kinematics, contacts with the robot hand.
Y Combinator@ycombinator
Origami Robotics is building high-DOF robotic hands with in-joint motors and a co-designed data-collection glove to eliminate the embodiment gap by collecting high-quality, real-world data at scale. Congrats on the launch, @DanielXieee and @QuanliangX! ycombinator.com/launches/Pcl-o…
English
@DanielXieee @QuanliangX is this specifically at the knuckle joint? or all joints on the finger
English
@eufrizz @QuanliangX For tripod holding like writing ✍️, the hypertension will maximize the contact area and hold the thin objects stronger
English
Eugene retweetledi
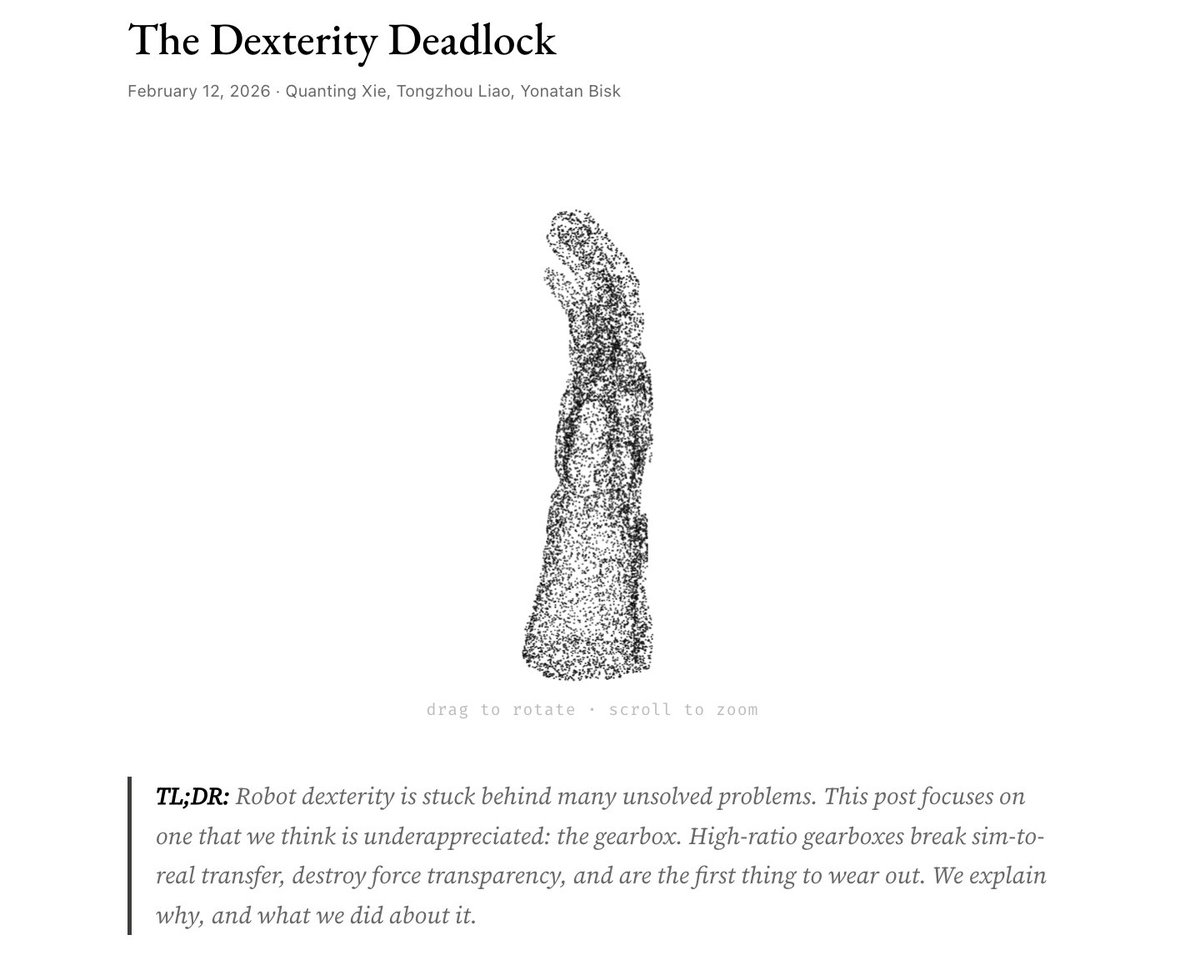
Why does manipulation lag so far behind locomotion? New post on one piece we don't talk about enough: The gearbox. The Gap You've probably seen those dancing humanoid robots from Chinese New Year. Locomotion isn't entirely solved; but clearly it's on a trajectory. But we haven't seen anything close for manipulation. 𝗪𝗵𝘆? When sim-to-real transfer fails, the instinct is to blame the algorithm. Train bigger networks. Crank up domain randomization. Those approaches have made real progress; we don't deny that. But we started wondering: are we treating the symptom or the disease? The Hardware Bottleneck: Fingers are too small for powerful motors. So most hands use massive gearboxes (200:1, 288:1) to get enough torque. But those gearboxes break everything manipulation needs:
• Stiction and backlash are complex to simulate. Policies trained on smooth physics hallucinate when they hit that reality.
• Reflected inertia scales as N². At large gear ratio, the finger hits with sledgehammer momentum.
• Friction blocks force information. The hand becomes blind.
And they're the first thing to break. What we are trying to build at Origami, we cut the gear ratio from 288:1 to 15:1 using axial flux motors and thermal optimization. The transmission becomes more transparent: backdrivable, low friction, forces propagate to motor current. Early signs are encouraging. Still running quantitative benchmarks. Why Interactive? I love how Science Center uses interactive devices to explain complex ideas. I want to borrow this concept and help people understand the hard problems in robotics better visually. The post has demos where you can toggle friction, slide gear ratios, watch the sim-to-real gap widen in real-time. What's inside:
• Interactive demos (friction curves, N² scaling, contact patterns)
• Comparison table: 14 robot hands by sim-to-real gap and force transparency
• The math behind why low-ratio matters
Read it here: origami-robotics.com/blog/dexterity… We're not claiming we've solved dexterity. The deadlock has many pieces. But we think this one's foundational. Curious what you think.
English
@kevin_zakka Amazing, thank you Kevin, will give it a shot (and reread the docs 😅)! Is it common for manipulation envs to use these settings?
English

@eufrizz #preventing-slip" target="_blank" rel="nofollow noopener">mujoco.readthedocs.io/en/stable/mode…
condim=6, elliptic and impratio>1 should help
English
for the past year I didn't know why I could never get this model to grip a fucking box, and why it intersected so badly. today I was diving in again and wondered if swapping out the gripper STL model (left) for a box primitive (right) would improve the contact modelling. et voilà
English

they have collected much of the australian mafia in one place—risky
Stanford ANZ@Stanford_ANZ
gday world Excited to announce the inaugural ANZ in AI Forum @ Stanford on Sat March 7th! Open to all Stanford students and some ANZ guests: luma.com/oqay9x87 ft @chrmanning, @_sholtodouglas, @tuhinone, @lachygroom, @danielhanchen, @FlintCasey, @oneill_c, @clarejtbirch, @JamesAlcorn94, @KathrynZ_Skip, @minmintymin, @saron__berhane, @TobinSouth, @TristanHeywood, organized by @shiye_su, @janetzhong82, @blackbirdvc
English

@eufrizz What's the difference between the depth image and ray cast/tracking? They all can give the depth image to high level policy.
English

little blog post write up + code if you want to try it yourself: eufrizz.github.io/perceptive-loc…
English
Eugene retweetledi
Really excited to see the creativity and community engagement around mjlab 😍
Here’s a thread of what people are building 🧵👇
English
@kevin_zakka the accelerated raycast sensor is exactly what I needed :) x.com/eufrizz/status…
Eugene@eufrizz
new GPU-accelerated ray tracing in mjlab/mjwarp means you can now train your humanoid to do perception-aware locomotion with height maps!
English
Some exciting Friday news 🙂
We just open-sourced our system identification toolbox in MuJoCo 3.5. Get started today: "pip install mujoco[sysid]"
mjlab v1.1 is also out featuring a brand new RGB-D renderer and now fully available on PyPI. Install with: "pip install mjlab"
English
English

1/ General-purpose robotics is the rare technological frontier where the US / China started at roughly the same time and there's no clear winner yet.
To better understand the landscape, @zoeytang_1007, @intelchentwo, @vishnuman0 and I spent the last ~8 weeks creating a deep dive on humanoid robotics hardware and flew to China to see the supply chain firsthand.
Here's everything we've created + our takeaways about the components, humanoid comparisons, supply chains, and geopolitics👇
English