
fabio bonsignorio
114 posts


My information consumption is now 1/4 X, 1/4 podcast interviews of the smartest practitioners, 1/4 talking to the leading AI models, and 1/4 reading old books. The opportunity cost of anything else is far too high, and rising daily.
English
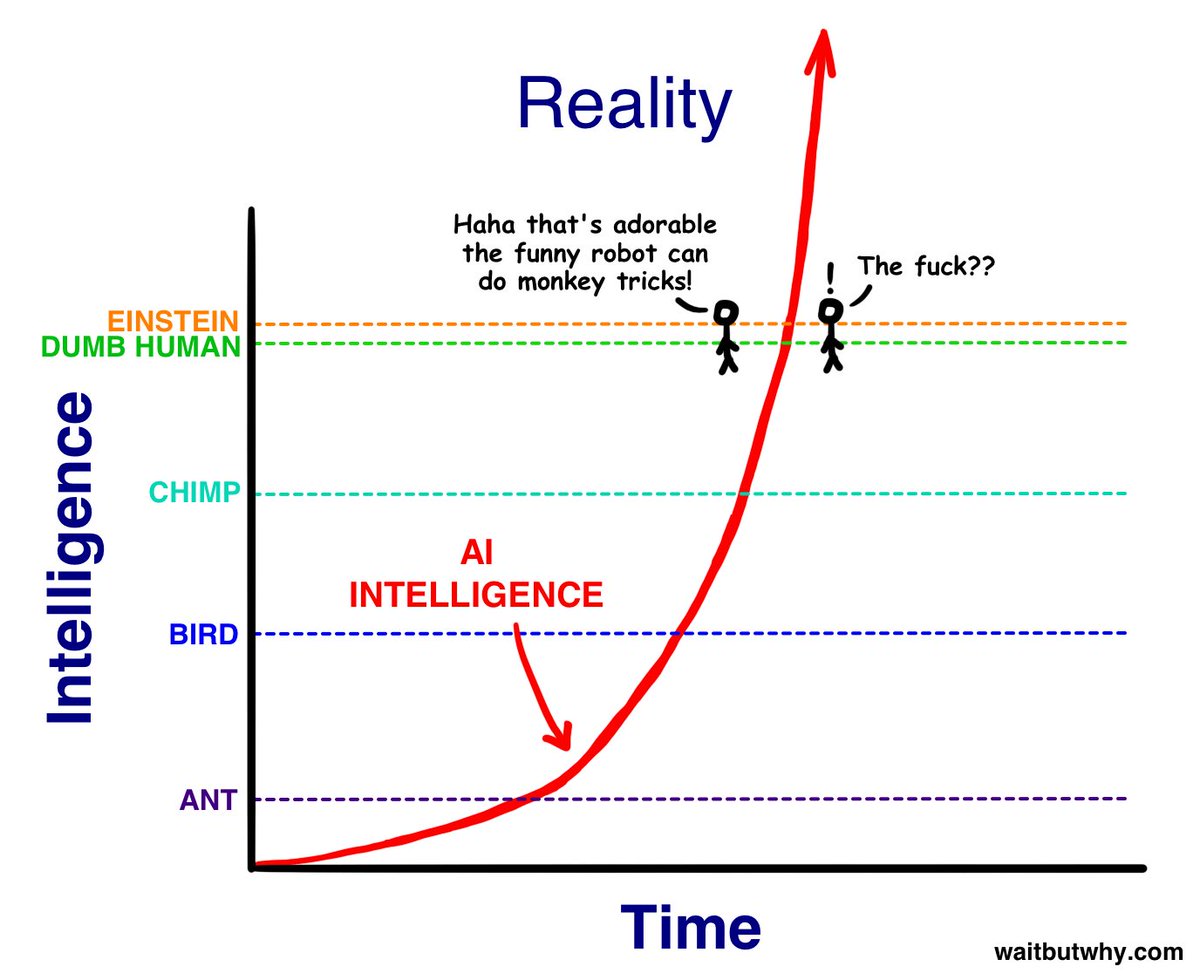
@elonmusk @waitbutwhy There are no times marked on the H 😎biggest flaw: you do need 3 curves: 1) human intelligence simulation (grok and fsd and optimus 😅😎, similar to the picture for now but a sigmoid 2) physical intelligence, ants birds etc, log (Time) 3) real agi, flat you will need (2) first
English

fabio bonsignorio retweetledi

fabio bonsignorio retweetledi

Transfer and lifelong adaptation remain central challenges for physical AI. Unlike LLMs, which benefit from more standardized interfaces, the complexity of robotic embodiments, environments, and human interactions - combined with limited pretraining data - renders pure generalization insufficient.
This roadmap by @Ken_Goldberg @davscaramuzza @aschoellig @RavinderSDahiya @petercorke @siddssrinivasa & Aude Billard nicely points out this and other key hurdles: arxiv.org/pdf/2507.19975
To dive deeper into the mechanisms for this, check out our survey (arxiv.org/abs/2312.01939) which summarizes the mechanisms and knowledge types needed to address this. While we only had a small section on the shift towards VLAs, the core ideas themselves transfer directly to this new paradigm! 🤖🚀
(And for the nano banana fans:)

English
fabio bonsignorio retweetledi

Studying generalist reward models is hard: robot datasets focus on successful demos, not failures.
We introduce:
- a large-scale reward modeling benchmark
- a data augmentation scheme
- a generalist reward model that outperforms frontier VLMs
Paper: arxiv.org/abs/2601.00675

Tony Lee@tonyh_lee
Reliable rewards are a bottleneck for real-world RL for robotics: human labels are costly, and handcrafted rewards are brittle. In RoboReward 🤖💰, we study VLMs as reward models and find they are unreliable across tasks, embodiments, and scenes. Paper: arxiv.org/abs/2601.00675
English
fabio bonsignorio retweetledi

Humanoid robots are coming, but don't hold your breath waiting for them:
news.berkeley.edu/2025/08/27/are…
English
fabio bonsignorio retweetledi
I agree. Either a risk taker will discover a breakthrough analogous to relativity or the DNA double-helix structure or there may be a lengthy plateau of incremental progress. We’re all placing bets and like baseball, there’s no clock on the game.
Jiafei Duan@DJiafei
What makes robotics so exciting right now is that everyone is making a different bet. World models. Learning from humans. Scaling real-world data. Simulation. Reasoning. New, affordable data-collection hardware. No one has the final answer yet.
English
fabio bonsignorio retweetledi

'Hamilton' turned 10 this summer. In @Reuters latest Culture Current, Leslie Odom Jr. speaks about returning to Aaron Burr, the show’s cultural legacy, and why it still resonates in 2025. Read the full Q&A: reut.rs/46nHOce
English
fabio bonsignorio retweetledi

fabio bonsignorio retweetledi
fabio bonsignorio retweetledi

Amazing that @SchmidhuberAI gave this talk back in 2012, months before AlexNet paper was published.
In 2012, many things he discussed, people just considered to be funny and a joke, but the same talk now would be considered at the center of AI debate and controversy.
Full talk:
English
SpaceX’s Giant Mars Rocket Completes Nearly Flawless Test Flight nytimes.com/2025/08/26/sci… via @NYTimes
English
fabio bonsignorio retweetledi
fabio bonsignorio retweetledi
Starship’s tenth flight test pushed the limits and provided maximum excitement along the way → spacex.com/launches/stars…



English
fabio bonsignorio retweetledi
fabio bonsignorio retweetledi

fabio bonsignorio retweetledi
a week later ... IEEE RAS ERAS very first edition happened at WPI, Rochester, MA, USA... but this is another story... erasrobotics.org ... check back ...😎
English
fabio bonsignorio retweetledi
Our colleague Enrica Zereik from CNR-INM and Heron@CNR Joint Lab showed her and our common work

English