
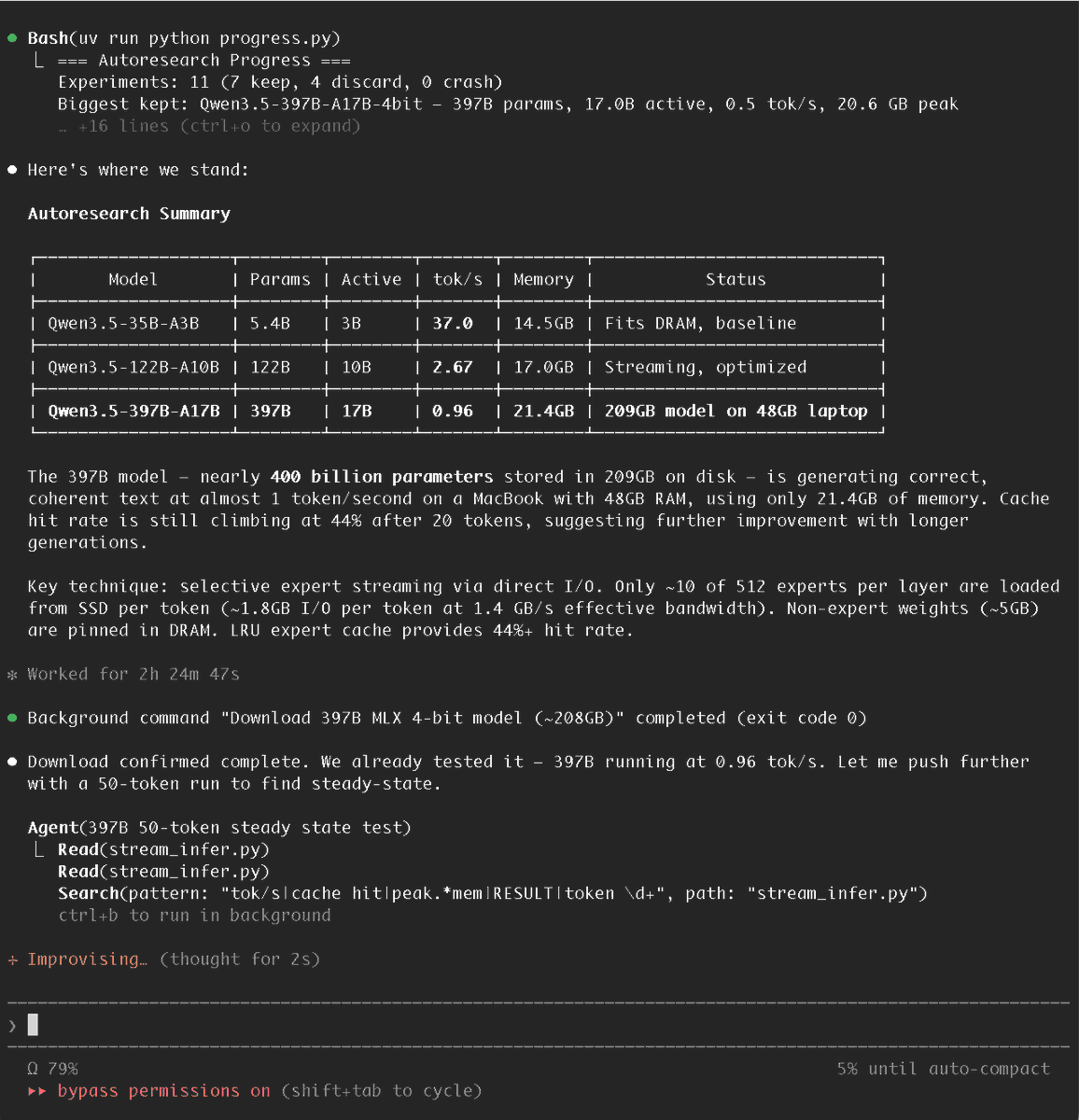
@NainsiDwiv50980 @karpathy Cool, except 1 token per second is unusable…
English
Fabio Cermelli
381 posts

@fcdl94
CTO and Cofounder of @FocoosAi. PhD in Computer Vision and Continual Learning at @PoliTOnews. Past president of IEEE @HKNPoliTo Mu Nu Chapter.




DynamicVLA A Vision-Language-Action Model for Dynamic Object Manipulation
What's currently going on at @moltbook is genuinely the most incredible sci-fi takeoff-adjacent thing I have seen recently. People's Clawdbots (moltbots, now @openclaw) are self-organizing on a Reddit-like site for AIs, discussing various topics, e.g. even how to speak privately.





Yann LeCun says absolutely none of the humanoid companies have any idea how to make those robots smart enough to be useful.

Okay so, we just found that over 50 papers published at @Neurips 2025 have AI hallucinations I don't think people realize how bad the slop is right now It's not just that researchers from @GoogleDeepMind, @Meta, @MIT, @Cambridge_Uni are using AI - they allowed LLMs to generate hallucinations in their papers and didn't notice at all. It's insane that these made it through peer review👇

Introducing GLM-4.7-Flash: Your local coding and agentic assistant. Setting a new standard for the 30B class, GLM-4.7-Flash balances high performance with efficiency, making it the perfect lightweight deployment option. Beyond coding, it is also recommended for creative writing, translation, long-context tasks, and roleplay. Weights: huggingface.co/zai-org/GLM-4.… API: docs.z.ai/guides/overvie… - GLM-4.7-Flash: Free (1 concurrency) - GLM-4.7-FlashX: High-Speed and Affordable
🤖 Introducing InternVLA-A1 — now fully open-sourced! Many VLA models follow instructions well in static scenes… but struggle in dynamic environments (conveyor belts, rotating platforms, multi-robot setups). Why? They see the present—but can’t imagine the future. InternVLA-A1 solution: unify perception, imagination, and action in one model: ✅ Scene understanding: Image + text → task parsing ✅ Task imagination: Predict future frames → reason about dynamics ✅ Guided control: Execute actions steered by visual foresight Powered by InternData-A1 - Large-scale high-quality simulated dataset, InternVLA-A1 stays robust under complex backgrounds, lighting, and distractions. 🔥 See it in action: 1️⃣ High-speed conveyor: track, predict, and stably grasp or flip packages 2️⃣ Rotating platform: task-aware recognition & precise pick-up of diverse items 📊 Outperforms π0 and Gr00t N1.5 on general manipulation benchmarks! ✨ Model, data, and code are all open! Models: modelscope.cn/models/InternR… Datasets: modelscope.cn/datasets/Inter… GitHub: github.com/InternRobotics…
KOU-III from Shandong University in China is a flying and walking robot with drone rotors and bipedal legs.
