
Limbo
2.1K posts

Limbo
@joenny_stark
|| #ChelseaFC 💙||Music🖤|| Anime and movies❤ || Games💛 || i make stuff 🧡
Katılım Ekim 2019
290 Takip Edilen110 Takipçiler




@weloveghana042 Who’s to say we strap some explosives to destroy their equipment
English

The moment some galamsey miners spotted a drone and started running away thinking it was security officials
English



@aiwithmayank FreeCAD is terrible. I would not use it even if the developers paid me to do so...
English

AutoCAD costs $2,030 a year.
SolidWorks costs $4,195 a year just for the standard license.
Someone open sourced a 3D parametric modeler that does most of what both of them do, and you can install it on Windows, Mac, and Linux for $0.
It's called FreeCAD.
Sketch geometry-constrained 2D shapes, extrude them into parametric 3D models, and edit any parameter in the history tree to update the entire design instantly.
Reads and writes STEP, IGES, STL, DXF, OBJ, and IFC out of the box.
28.9K stars. LGPL-2.1. 100% Opensource.
freecad.org

English



Designed Spec Sheet for UGV and UAVs: Archer VTOL Spec Sheet
Druids@druids01
Will be sharing snippets of the shareable work I did for Terra Industries👀
English
@yacineMTB Nope
Purely Mechanical background but trying to challenge myself
English


If you are still in software and your garage isn’t looking like this you are ngmi…

Eren Karapinar@manufacteren
Two Turkish brothers building drone what could go wrong @BaykarTech
English
@yabbanx You lots seriously don’t understand self driving
@AduLumumba
English





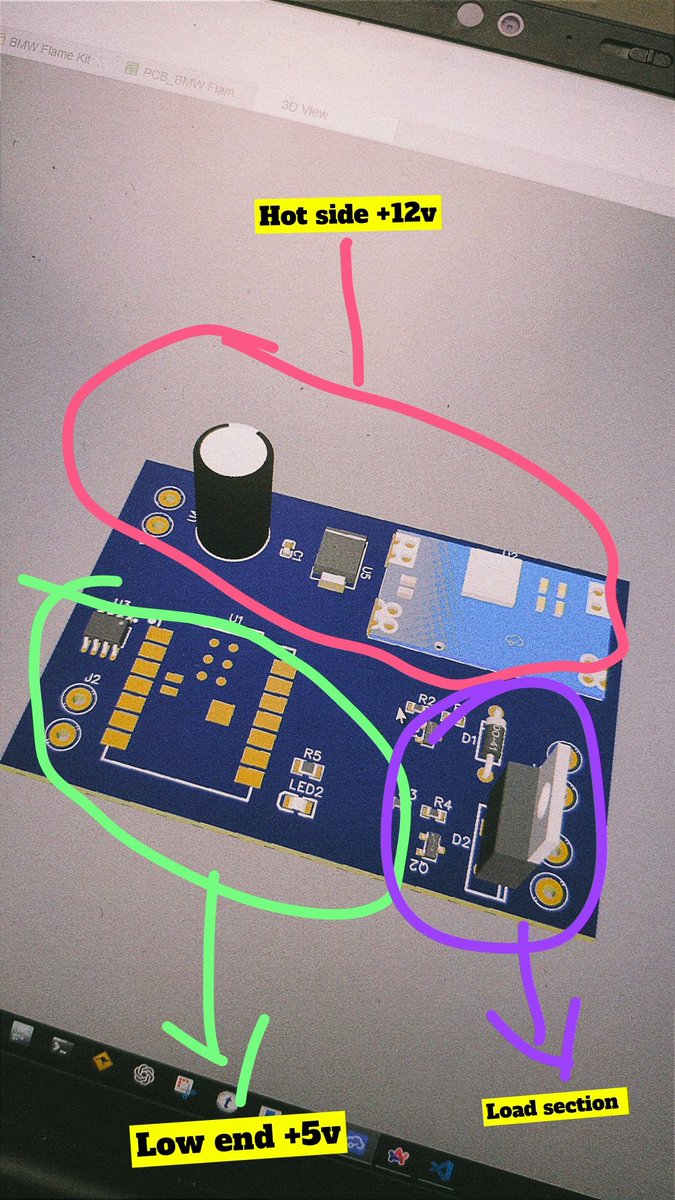
@arlteam @OpenRoboticsOrg Broooooo @joenny_stark you will het what you need here i think he provides the github for it too.
English
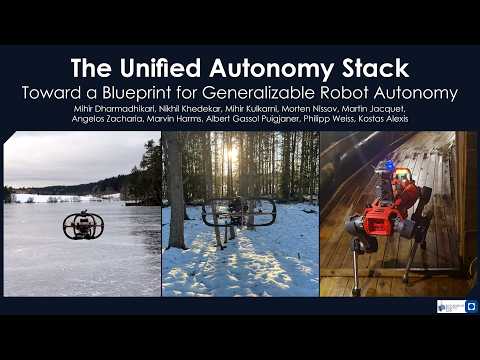
🤖 One Unified Autonomy Stack across Robot Morphologies
We are excited to share the pre-print and full open-source implementation of our work: "The Unified Autonomy Stack: Toward a Blueprint for Generalizable Robot Autonomy".
🎥 Video: youtu.be/l8Su8OXsM-E #robotics
YouTube
English

JUST IN: Govt Opens GH¢5,000 to GH¢500,000 Start-Up Loans for Young Entrepreneurs Under 24H+ Programme
English

Underwater SLAM is one of the hardest unsolved problems in robotics.
And an open-source project called AQUA-SLAM is taking it on.
Here's why underwater SLAM is so brutal compared to standard environments:
→ No GPS, zero external positioning reference
→ Poor visibility, cameras struggle where light doesn't reach
→ Sensor drift, errors compound fast with no corrections
→ Feature scarcity, almost nothing to anchor a map to (open sea or ocean lol)
AQUA-SLAM combines stereo cameras, IMU and a Doppler Velocity Log to tackle localisation and mapping in conditions that defeat conventional systems.
It ships with sensor calibration, loop closure, full ROS integration and real underwater datasets out of the box.
Why does this matter beyond the lab?
Underwater robotics is one of the most underloved and underinvested areas in the entire robotics stack, and one of the most commercially important.
Pipeline inspection. Offshore energy infrastructure. Deep-sea mining. Environmental monitoring. Search and rescue.
All of it requires robots that can navigate reliably where humans cannot go and GPS does not work.
Open-source projects like this are how the field moves forward. Someone builds the foundation. The community builds on top of it.
If you're working in underwater robotics, sensor fusion or visual-inertial SLAM, this one is worth exploring.
VERY INTERESTING. 🌊
Here's the GH: github.com/SenseRoboticsL…
~~
♻️ Join the weekly robotics newsletter, and never miss any news → ziegler.substack.com
English
