Sabitlenmiş Tweet

Here is your #ROS and open source robotics news for this week:
🏎️Last day for discount ROSCon tix is 7/12
🏎️Autonomous RC cars at ROS By-the-Bay
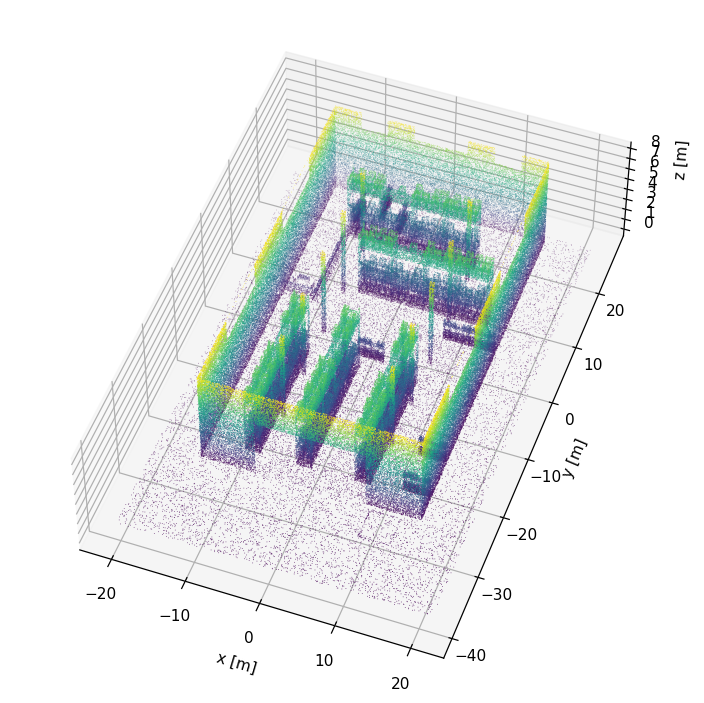
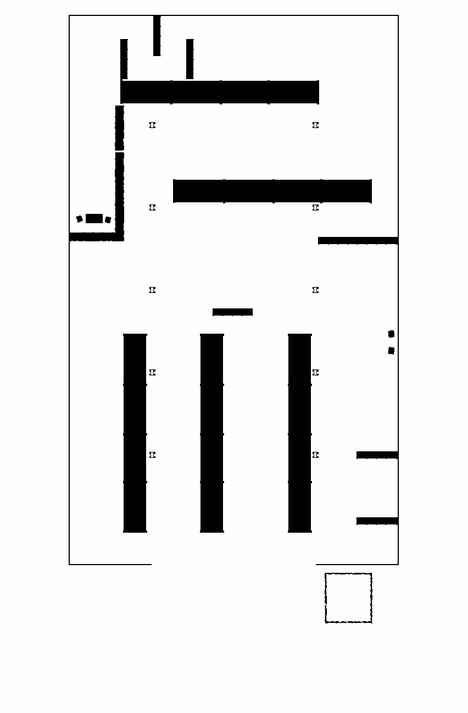
🏎️Satellite data to @GazeboSim models
🏎️Plot Juggler 4.0 drops
🏎️@DRoboticsDev joins the OSRA
🏎️OSRF gets a new CPO
🏎️More!
⬇️⬇️⬇️

GIF


English