lesh
170 posts


@lesh_bla would you be interested in trying out something i have opensourced ? does a bit more than the linear hillclimbing loop that autoresearch does
check it out and lmk !
github.com/evo-hq/evo
English






@alokbishoyi97 just program.md and claude, I add a /loop in case it gives up
English
@lesh_bla super cool ! how do you run your autoresearch loops ?
English



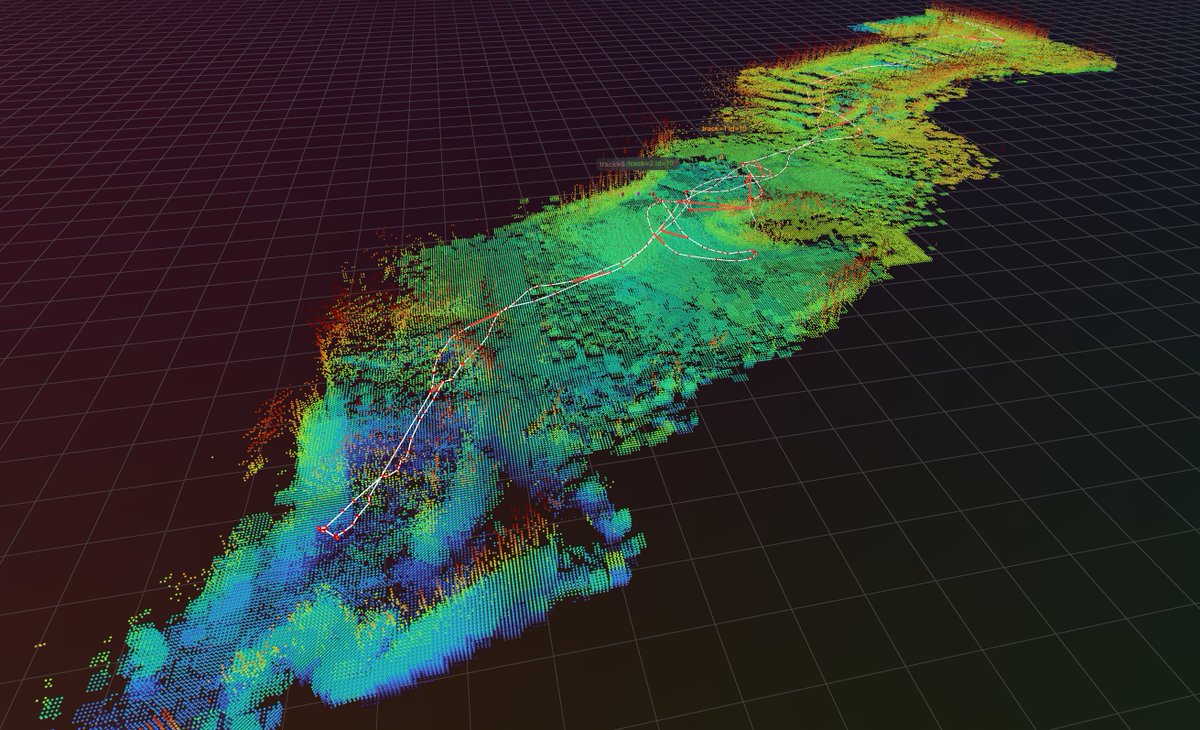
@taylor_sntx leshy.github.io/sunsim/ did a similar thing for a plot via a drone photogrametry scan + sat heightmap data
English