Sabitlenmiş Tweet

📢 New paper out!
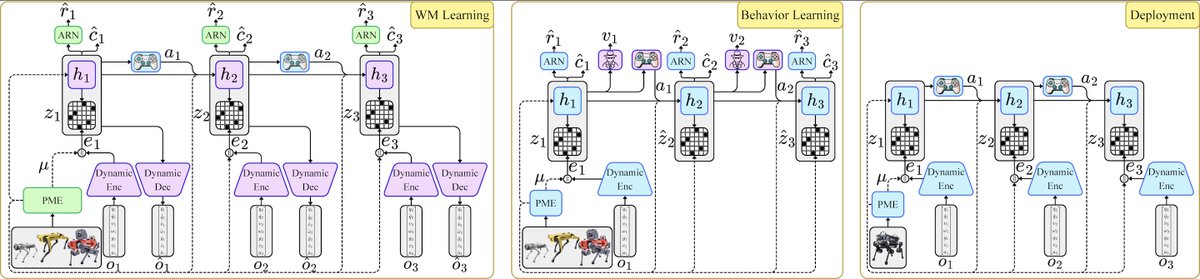
We introduce QWM: a single locomotion world model trained across 8 quadrupeds and deployed zero-shot on robots it had never seen by conditioning on their morphology specs: ANYmal-D and Unitree Go1 🦾
No fine-tuning, no warm-up, no retraining from scratch.
The key insight: robot morphology isn't a latent variable to infer from motion history, it's a known engineering spec sitting in the USD (or URDF) file. So we just use it directly.
GIF
GIF
English