simleek
2.9K posts
simleek
@simulatorleek
AI + Occasional Functional 3D printing + Wrong Opinions + misc
Katılım Ekim 2021
379 Takip Edilen224 Takipçiler



@BluebriarArts They can always be re-lit with mirth and whimsy even if vicariously.
Imagine a story you're reading and it's just so bad you want to put the book down, and then imagine it takes a turn and something interesting happens instead, so you start paying attention again.
English

I might actually be low sanity or experiencing some really bad long-lasting derealization, but like 20-30% of people I see day to day have no light in their eyes
English
@ItIsHoeMath @charlie1zulu @gregreese Well, that's quite actionable. I could take notes on some laws in different places and send/ present the info somewhere to see if it's useful. Legal text is a bit easier than research papers.
English

I recently moved and I don't know anything about the politics in my area.
One thing that I desperately need other people to do for me is to gather information about what's going on politically in localities across the country so that we can organize people to take action in them. I want to help strategize. I think my analytical abilities can really help there. Organizing is the hard part.
English

At which point does the American citizen become complicit in US war crimes? Or are we all just livestock?
English
@ItIsHoeMath @gregreese I wonder what would happen if the US government got itself involved in several wars at once, so unpopular that drafts didn't work, so they relied on tech and lost their military tech capability to drones over time and didn't recover it due to lack of drone specific manufacturing.
English
Propose a serious course of action to stop the US government from doing anything it wants.
If you ask me, the US government is doing at least six dozen treasonous things that we should be putting them to death for.
So how do we do anything about any of that? You want me to go to my Town Hall meeting?
English





Just for the purpose of this as a thought experiment:
Taking out Charlie Kirk has had a catastrophic effect on right wing politics and the world.
But if it had been Candace or any of the other mindless drones who have capitalized on his death, literally nothing would’ve changed. It would’ve been a tragedy, but with no measurable downside. For that reason, no one would have any incentive to do it, so she’s essentially immortal.
English
@elonmusk @diana_dukic Variational training, not just normal backprop or graphs, and each representationshould be visible and selectable. People like different things at different times, there are too many categories to make, and variational auto encoders solved that problem a long time ago.
English


Went from scrolling 24/7 to not even wanting to log in. X just hasn’t been hitting the same lately.
English
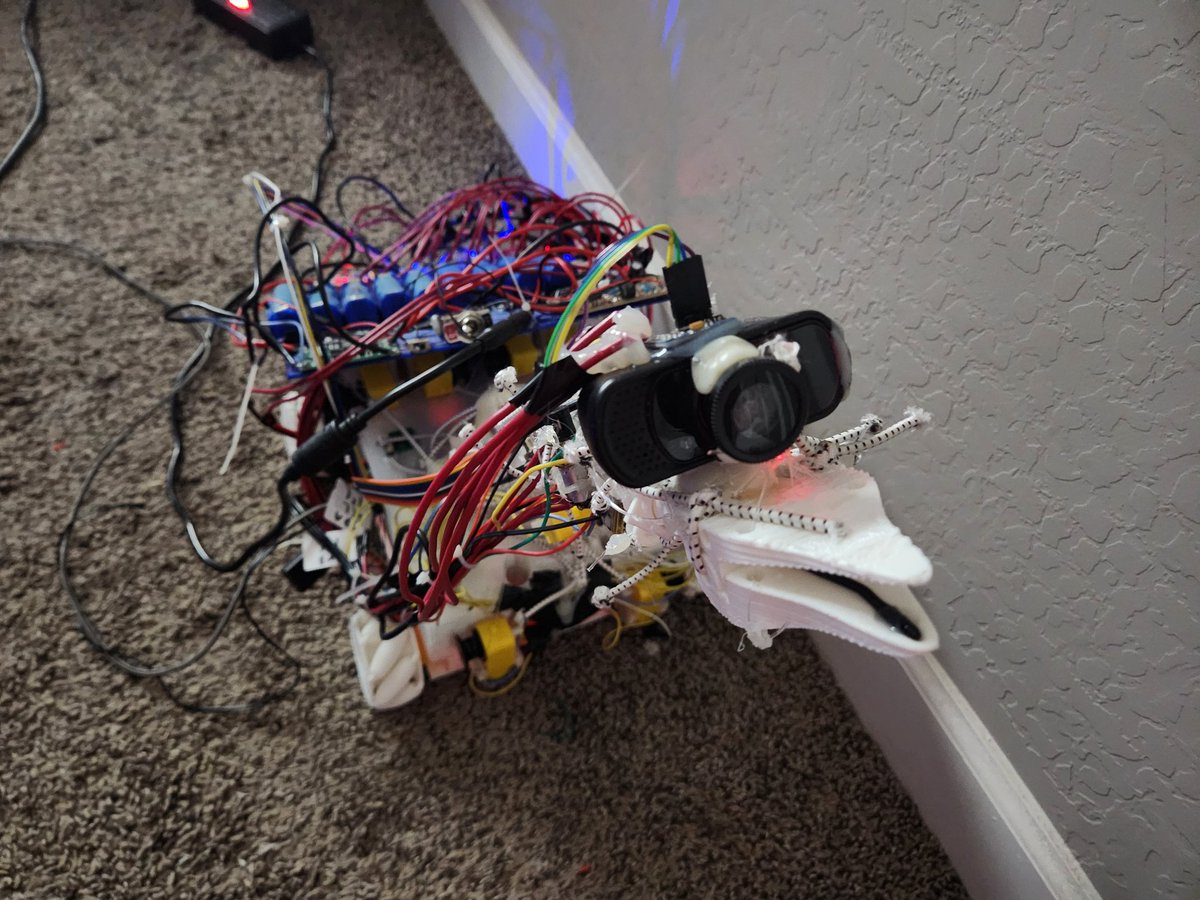
The limb on the right couldn't print fully because the printer took too much energy and shut itself off trying to keep the bed at 75c.
The limb on the left printed fully because I lowered the bed temp to 60c, but it came off the bed, warped, and maybe dragged the print head.
English

@SonicKeyblade00 @Arin_Yumi You should absolutely be able to make a Hitler joke in Germany.
Now, you have to think, 'is this joke worth jail time'?
I mean, if it's a really funny joke...
English

@Arin_Yumi Umm nah. Trump shouldn't have said it. I see other commenters saying: "Oh, in America that's fine".
It really isn't. It shouldn't be. And if it is, that just says how wrong things have gotten in the states. You wouldn't (or shouldn't) make a Hitler joke in Germany.
English

Japanese news outlets were doing a live translation of the press conference, and when Trump dropped the Pearl Harbor joke the translators were audibly lost for words and paused for a few seconds in disbelief
English

@fkasummer It's kinda lonely on the frontier. I want to find some people and have then join.
English
