Sabitlenmiş Tweet
S.Sato
46.8K posts

S.Sato
@snjru
機械設計/開発(主に家電系)OpenCV画像認識勉強中 機構設計チャンネル https://t.co/UUNKUQvz1Y 成形品設計チャンネル https://t.co/bBmb20aWkj note https://t.co/okf2VyYSDV
Tokyo,Japan Katılım Ağustos 2013
539 Takip Edilen1K Takipçiler



CNC機械とか3D CAD/CAMとか導入されて「これでなんでも簡単にできるだろ」なんて言われて苦しむのが技術者
S.Sato@snjru
新技術が出た時に「わー!コレで何でもできるんだー!わー!」って騒いでる人より、現実的にどこまで使えるのかを検証し試行錯誤している人が技術者。それゆえに実質的に一番その新技術に触れていて、理解している。それゆえ、その新技術のデメリットにも言及する。こんな事は、3DCADでも3DプリンタでもAIでもずっと起こっている。
日本語

何を言ってるのかよく分からないですが,LiDARであれば未学習物体の3次元形状を実時間で把握することもできますよ.画像だと厳しいと思います(そもそも形状を正確に推定するのが厳しい).LiDARとカメラはセンサの特性上,得意不得意がかなり違うので,相補的に使うしかないですね.
なな@samity2183
@GipI0dWNY7T73UE LiDARは障害物の検知しか出来ないので、物体の形を認識して動きを予測することが苦手 要は緊急ブレーキはLiDARに軍配が上がるけど、自動運転技術としてはカメラが必須 こんな限定的なシチュエーションの検証で自動運転を語ってるのがそもそもアホらしい
日本語
S.Sato retweetledi
ROS 2 Humble対応の小型移動ロボット「FuzzBot-Lite」も近日中に発売開始したいなと思ってます.開封後直ぐにSLAMやNavigationが動作する状態になっていて(組立完成品),組立が必要なTB3 Burger等と比較してもかなり安く販売できそうです.教育研究用途向けです.
#ROS #DYNAMIXEL #FuzzRoBo

東海林ファジィロボット研究所 所長兼CEO@Toukairinn_FUZZ
今日は高専時代の友人とファジィ研オフィスでロボット製品の撮影とかをした後に,立川で超かぐや姫を観てきてそのまま聖地巡礼してきました.何だか自分も同じような研究をしてみたくなりました.あと,立川に住みたくなりました.
日本語
S.Sato retweetledi
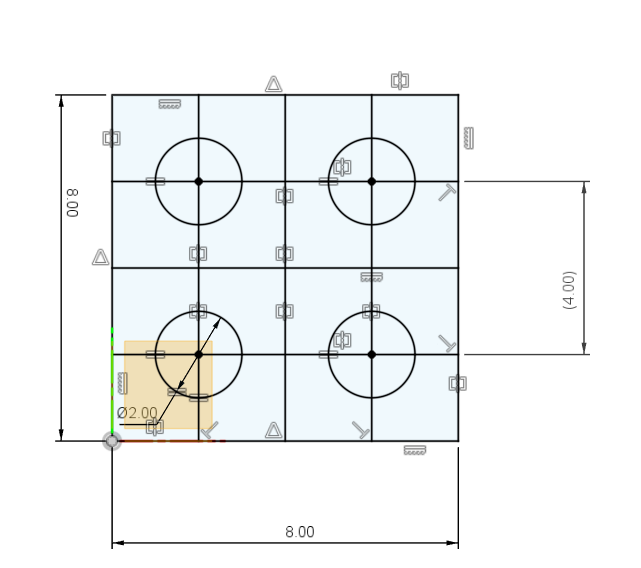
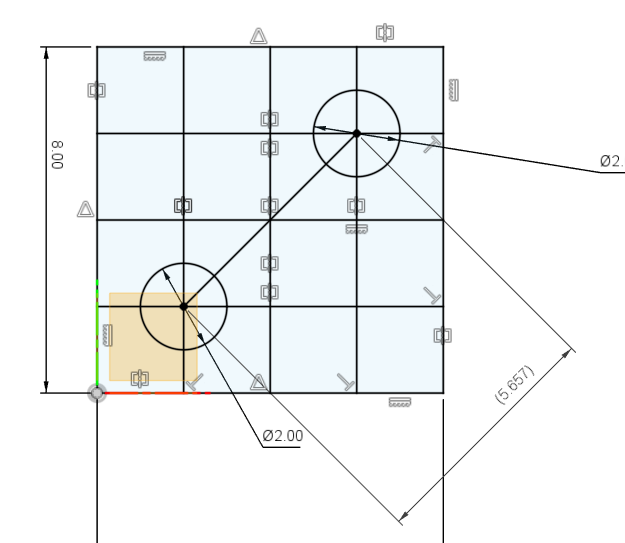
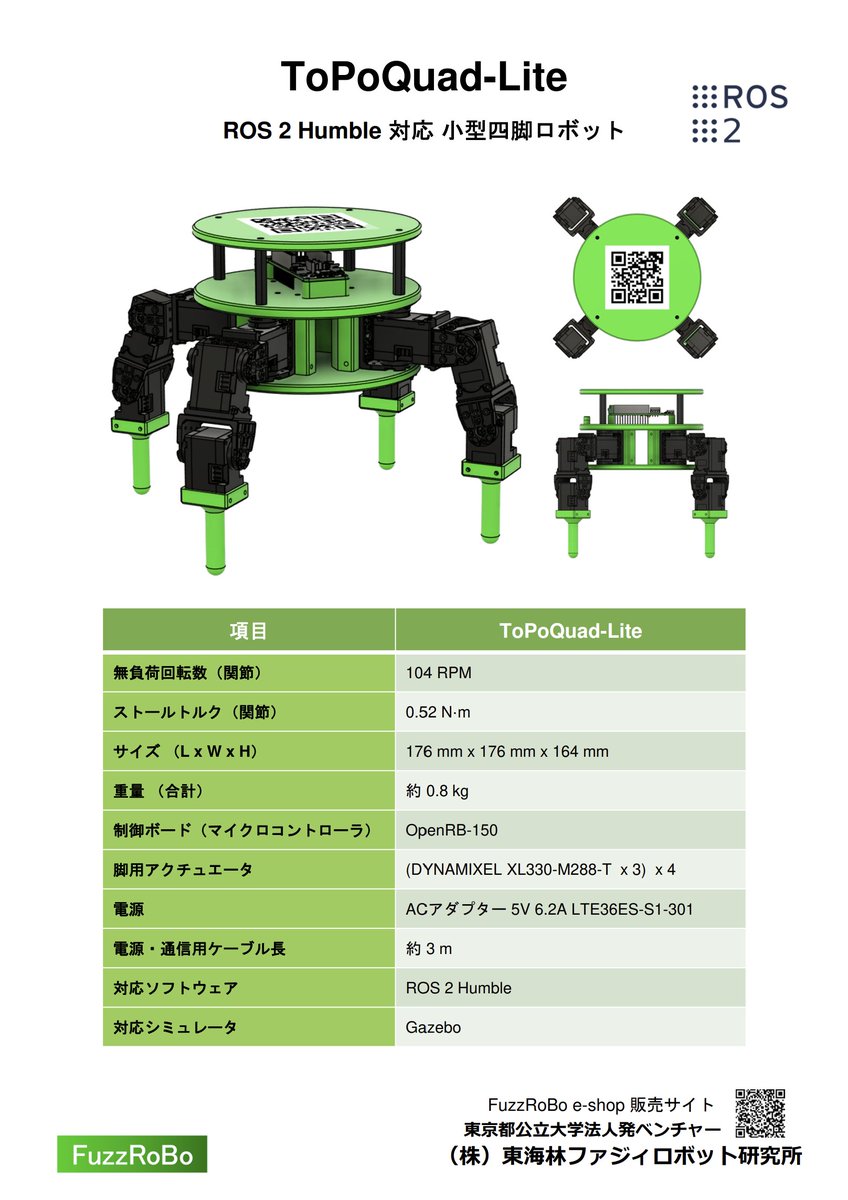
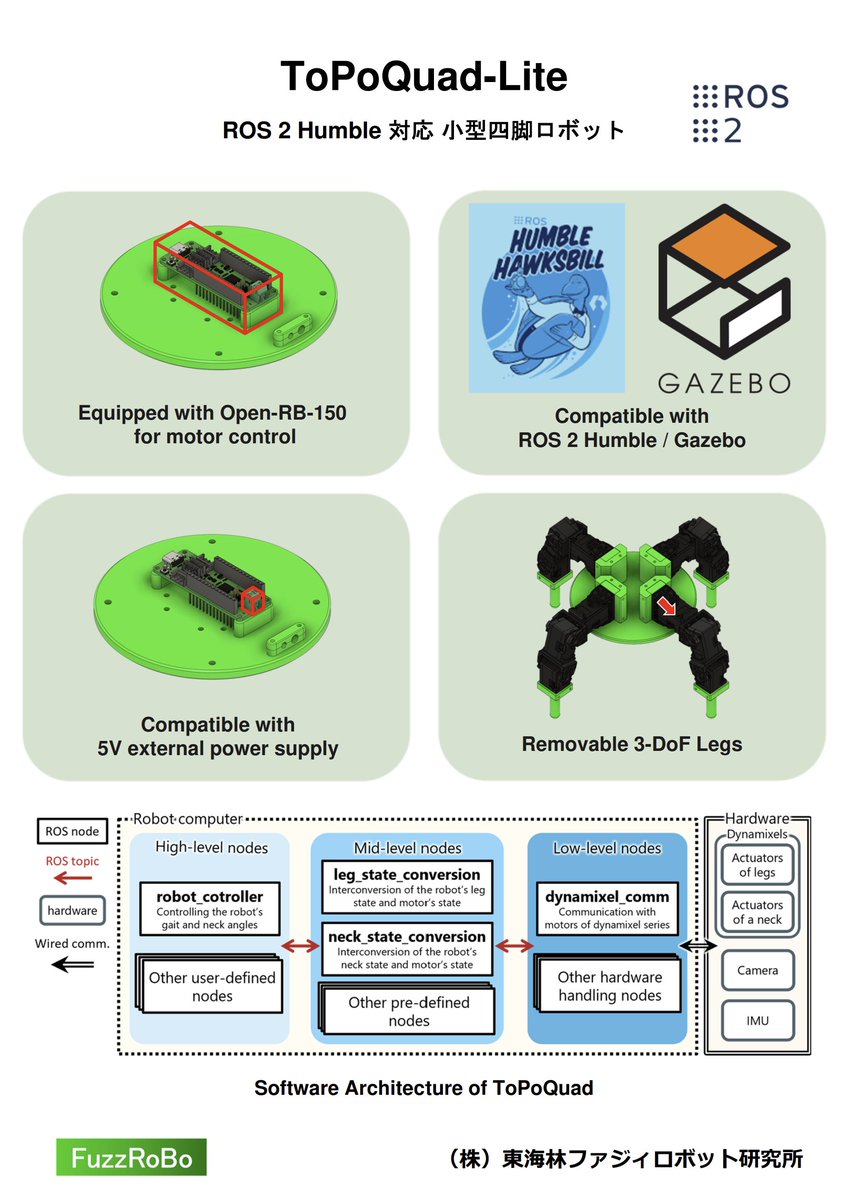
FuzzRoBo e-shopにて,ROS 2 Humble対応の小型四脚ロボット「ToPoQuad-Lite」の販売を開始しました.完成品のため,購入後直ぐに動かせます.小型で扱いやすいので,研究開発や教育用途で是非お使いください.価格は電源等込みで88,000円(税抜)です.
※本商品は有線での使用を前提としています

日本語
@sakamoto_pe 技術士じゃないけど、ソレをずっと言い続ける設計者人生でした。コレが技術者倫理なのかどうかは分からんけど、そもそもそんな保証はどこにもないという事実が経験的に身に染みていると、どうやっても言えないんですよ。
日本語

「100%安全」と言い切りたい誘惑。しかし、技術に絶対はありません。残存リスクを明確にし、どう管理するかを誠実に伝える。それこそが専門家としての誠実さであり、信頼の根幹です。耳当たりの良い言葉よりも、根拠あるリスクの提示を。技術士としての譲れない一線がそこにあります⚖️🛡️
#技術者倫理
日本語