
Baruch Tabanpour
423 posts

Baruch Tabanpour
@the_real_btaba
Robotics @GoogleDeepMind. I work on MJX, MuJoCo, and brax. I'm just a yellow sponge in a big sea.
Katılım Ağustos 2014
549 Takip Edilen768 Takipçiler

Robotics won't be the same again. @EkaRobotics
Pulkit Agrawal@pulkitology
Until now, robotics stopped where the human hand begins. Strong, but not delicate. Precise, but not adaptive. Repetitive, but not creative. The human hand wasn’t a benchmark — it was a boundary. We are crossing it. @EkaRobotics. Coming soon.
English
Baruch Tabanpour retweetledi

We’re rolling out an upgrade designed to help robots reason about the physical world. 🤖
Gemini Robotics-ER 1.6 has significantly better visual and spatial understanding in order to plan and complete more useful tasks. Here’s why this is important 🧵
English
Baruch Tabanpour retweetledi

Releasing the alpha of Unreal Robotics Lab — an open-source Unreal Engine plugin with full MuJoCo physics.
Photorealistic rendering and accurate contact physics. No compromises on either side.
GitHub: github.com/URLab-Sim/Unre…
Paper: arxiv.org/abs/2504.14135
English
Come work with us?
Maria Bauza Villalonga@bauzavillalonga
We are hiring full-time research scientists in dexterous manipulation! We've got multiple openings at Google DeepMind London. Apply at job-boards.greenhouse.io/deepmind/jobs/… and job-boards.greenhouse.io/deepmind/jobs/…. And feel free to ping me if you apply 😄🤖
English

I suppose this is as good a time as any to share that I've joined OpenAI. I plan to continue supporting a few open source humanoid companies like @asimovinc and anvil.bot where I can. The next few years are going to be pivotal. Excited to help build the singularity.
English
Baruch Tabanpour retweetledi

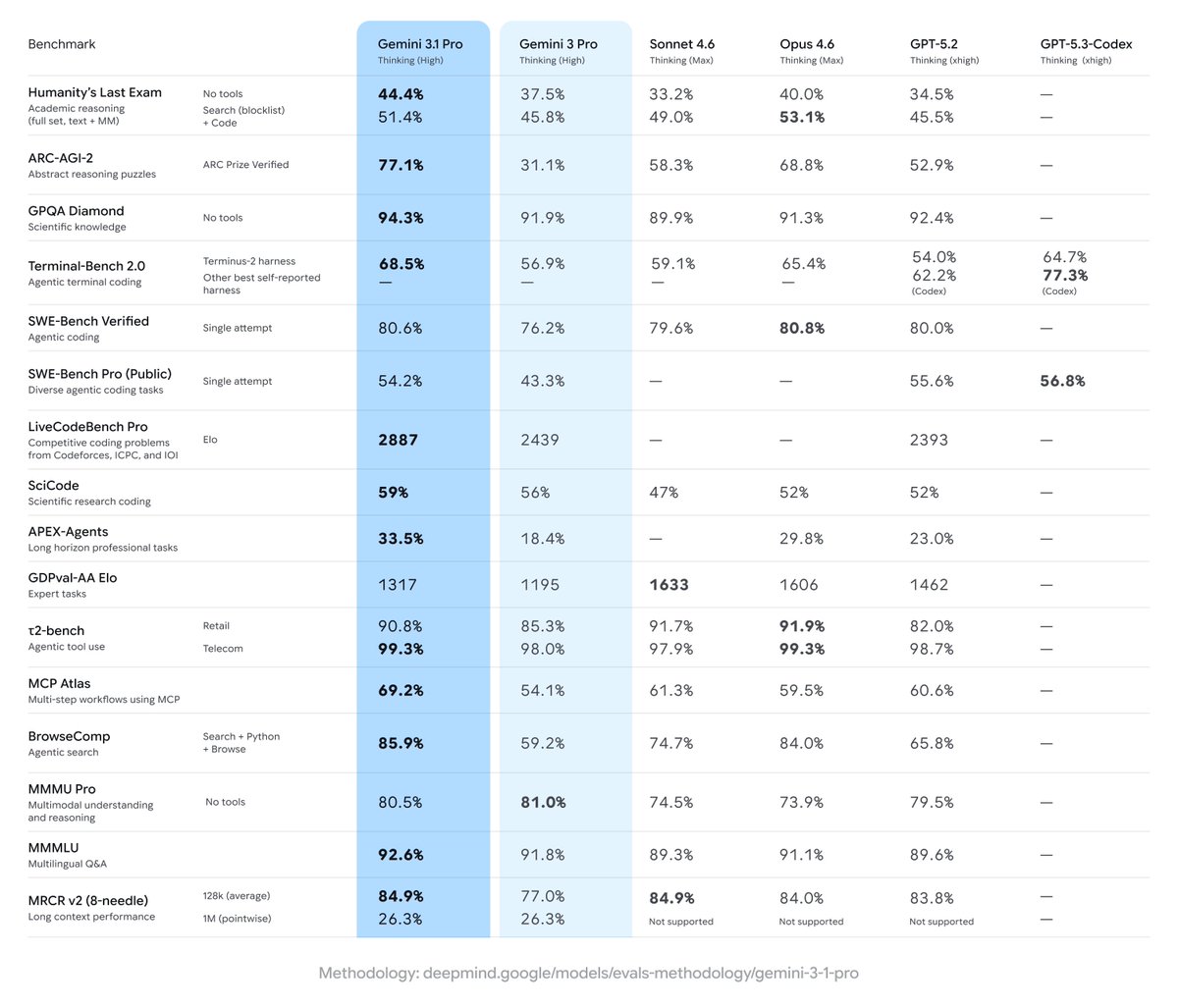
Excited to launch Gemini 3.1 Pro! Major improvements across the board including in core reasoning and problem solving. For example scoring 77.1% on the ARC-AGI-2 benchmark - more than 2x the performance of 3 Pro. Rolling out today in @GeminiApp, @antigravity and more - enjoy!
English
Baruch Tabanpour retweetledi

Physical simulation, embodied reasoning, inverse kinematics, 3D rendering, you can do all these in a browser window. This is amazing.
Great work #mujoco team and Xavier Plantaz and @ptruiz_dev from the #Gemini Developer Experience team!
Omar Sanseviero@osanseviero
Learn how to build robotics simulators entirely in the browser MuJoCo (WebAssembly) + Three.js + Gemini ER
English
Baruch Tabanpour retweetledi

MPM in nvidia newton looks good !
Needed to modify some parts to make sim work.
English
I'm sure Claude is on it!
Thariq@trq212
We've received some feedback about a potential degradation of Opus 4.5 specifically in Claude Code. We're taking this seriously: we're going through every line of code changed and monitoring closely. In the meantime please submit any transcripts with issues through /feedback
English
Baruch Tabanpour retweetledi
Gemini 3 Deep Think is now available for Google AI Ultra subscribers in the @GeminiApp, incorporating our gold medal winning IMO and ICPC technologies! 🏅With its parallel thinking capabilities it can tackle highly complex maths & science problems - enjoy!

English
Baruch Tabanpour retweetledi

Sim-to-real learning for humanoid robots is a full-stack problem. Today, Amazon FAR is releasing a full-stack solution: Holosoma.
To accelerate research, we are open-sourcing a complete codebase covering multiple simulation backends, training, retargeting, and real-world inference.
English
@xiao_ted Took some time to jit compile, but it's finally computing!
English
Baruch Tabanpour retweetledi

Parallelised Q-Networks go continuous! 🚀
We’re excited to introduce PQN extended to continuous-action control — no replay buffers, no target networks, just pure online Q-learning + a deterministic actor.
Now you can use PQN + MuJoCo Playground to train full robotic policies in just seconds or minutes 🤖 All running entirely on GPU
👉 Blog post: mttga.github.io/posts/pqn_cont…
👾 Codebase: github.com/mttga/purejaxq…
1/5
English
Baruch Tabanpour retweetledi

Introducing GEN-0, our latest 10B+ foundation model for robots
⏱️ built on Harmonic Reasoning, new architecture that can think & act seamlessly
📈 strong scaling laws: more pretraining & model size = better
🌍 unprecedented corpus of 270,000+ hrs of dexterous data
Read more 👇
English
Baruch Tabanpour retweetledi

MuJoCo now supports sleeping islands!
youtu.be/vct493lGQ8Q
#sleeping" target="_blank" rel="nofollow noopener">mujoco.readthedocs.io/en/latest/comp…
YouTube
English
@xiao_ted @xf1280 @lgraesser3 @Stacormed @jackyliang42 @Kanishka_Rao @ColinearDevin @keerthanpg @sippeyxp @TianliDing @_anniexie Best of luck Ted! Amazing body of work
English

After 8 unforgettable years, I have decided to leave Google DeepMind. I feel immensely grateful to have had the opportunity to help transform the dream of general-purpose robot learning from a heretical fringe idea into a normalized technology roadmap. It has been the honor of a lifetime to work on the most challenging and important problems of our time with the brightest, kindest, and most talented colleagues I could have wished for.
Thank you to Julian and Vincent for taking a chance on me back in 2017, when a ragtag team at Google Brain began exploring the potential for end-to-end learning on arm farms in the real world. The team has always dreamed big: my “starter project” with Corey and Pierre was to work on a goal-conditioned imitation policy capable of going from any initial condition (latent embedding) to any goal state. That 3-month project turned into a 2-year endeavor! But even though research ambitions were lofty, colleagues and mentors have always been grounded and compassionate by default. Alex H, Karol, Julian, and Sergey supported my vision of concurrent control RL at scale while allowing me the space to grow into a creative researcher on my own terms.
The team’s technical progress and my own research taste began to accelerate substantially in 2020, when Kanishka and Karol inspired the whole team to bet big on one single crazy moonshot: a general robot policy that could accomplish thousands of household manipulation tasks. Such an unprecedented group effort was new to the whole team but extremely satisfying—to learn how to harmoniously navigate 0-to-1 real-world systems scaling (robot fleets, teleoperators, scaled learning stacks) alongside rigorous scientific exploration (an objective comparison of the scaling properties of imitation and reinforcement learning). I learned so much from all my comrades-in-arms during this time, and even to this day, many of my research and engineering intuitions draw from the lessons I learned from Eric, Yao, Alex I, Keerthana, and Yevgen.
The following period, starting in 2022, was absolutely magical and unique in the breadth and depth of imaginative explorations that I was privileged to contribute to and lead. Exploring the potential of foundation models for robotics changed my research outlook permanently, and projects like SayCan, RT-1, and RT-2 felt like the first magically viral moments when the world started thinking more seriously about what the promise of general and performant embodied AI might look like. When the first generalist VLAs began to reliably perform tasks that we hadn’t collected data for, it was a huge lightbulb moment for our team and the field. During this time, I was immensely inspired by what high agency, manic creativity, and blazing iteration speed can do for research, learning from extremely kind and productive colleagues like Fei, Brian, Andy, Pete, Quan, Harris, and Danny. I applied this approach of wildly creative research to areas I cared about, such as creating better action representations, understanding robot generalization, and leveraging VLMs for data quality and augmentation. I am grateful to teammates who joined me on these adventurous explorations, such as Chelsea, Dorsa, Jonathan, Wenhao, Tianli, Montse, Sean, Austin, Kelly, and Paul. I also deeply appreciate all the academic collaborations during this time—ranging from multi-institution cross-embodiment learning to open-source VLAs to scalable offline evaluation to organizing workshops. Thank you, students, interns, and friends; in particular, Soroush, Jiayuan, Laura, Xuanlin, Kyle, Karl, Oier, Dhruv, Annie, Jensen, Priya, Suneel, Ike, Homanga, Hao, and Xuesu.
In the final chapter of my career at GDM, starting in 2024, I became enamored with the science and impact of frontier models and how to harness them properly in robotics. It always fundamentally bugged me that robot learning often looked like “classical” machine learning of just fitting simple distributions with small models, rather than the polished scaled systems and science of how frontier models are developed with pre-training, mid-training, and post-training. I wanted to learn about that world and figure out how to make AGI understand the physical world. I am proud of the progress we have made, and from where we started with Gemini 1.0 to today, the research innovations we have unlocked have placed both Gemini and Gemini Robotics clearly at the forefront of both fundamental world understanding and general VLA control. Thank you so much to my teammates in Embodied Reasoning who make every day bright, interesting, and fun: Fei, Jacky, Laura, Wentao, Annie, Lewis, Ksenia, Mohit, Sean, and Danny. Thank you to friends in Gemini Multimodal who taught me how to frontier model: Xi, Karel, Ishita, and Xudong. Thank you to the VLA whisperers who have shown me how very far innovation and perseverance can take you: Coline, Giulia, Claudio, Alex L, Sumeet, Ashwin, Sudeep, Debi, and Ayzaan. Thank you to mentors throughout the years who have provided shining examples that velocity and impact, and compassion, are not zero-sum: Carolina, Jie, Kanishka, Nicolas, Jonathan, Pierre, Vincent, Karol, Sergey, Chelsea, and Julian.
Thank you, thank you, thank you. It has been such an unbelievable adventure, and I am so fortunate to have been part of the crazy team that started the technology breakthroughs transforming the world into one where general and helpful embodied AGI is ubiquitous in society. I will always be #1 GDM fan! As for my own journey, I will be embarking on a new adventure, both familiar and very different, and hope to have more to share soon.


English
Baruch Tabanpour retweetledi
Fundamental spatial and temporal understanding is the bedrock upon which robots will learn motor control.
These types of Embodied Reasoning capabilities enable policy learning but also inference abilities like image or video conditioning.
We just released a new SOTA ER model!
English
Baruch Tabanpour retweetledi

We open-sourced the full pipeline! Data conversion from MimicKit, training recipe, pretrained checkpoint, and deployment instructions.
Train your own spin kick with mjlab:
github.com/mujocolab/g1_s…
English
@johannesack @kevin_zakka @sudhirPyadav MJX is sort of becoming a JAX API to various MuJoCo implementations, so you can also call into Warp if you really wanted to
English

@the_real_btaba @kevin_zakka @sudhirPyadav MJX isn't the JAX implementation of MuJoCo?
Is there another Jax MuJoCo?
English
I'm super excited to announce mjlab today!
mjlab = Isaac Lab's APIs + best-in-class MuJoCo physics + massively parallel GPU acceleration
Built directly on MuJoCo Warp with the abstractions you love.
English
@kevin_zakka @sudhirPyadav Might want to distinguish MJX from the JAX implementation of MuJoCo...I know it's confusing :P
English
@sudhirPyadav Compared to the JAX backend, it's much faster. There's things you can't even compile with MJX and it's no problem for mjwarp. For example, mjlab supports rough terrains (not possible in mjx):

English