Sabitlenmiş Tweet

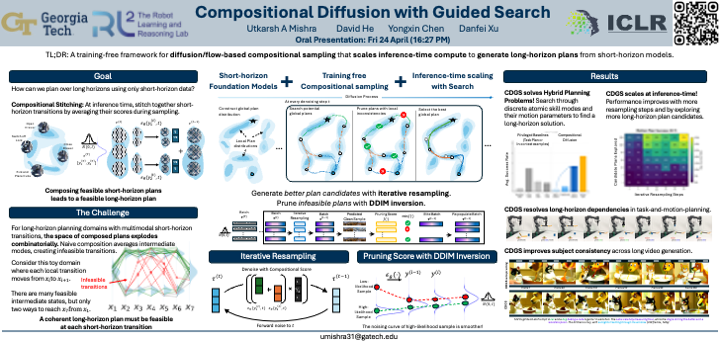
Our paper "Compositional Diffusion with Guided Search (CDGS)" is an Oral at #ICLR2026!
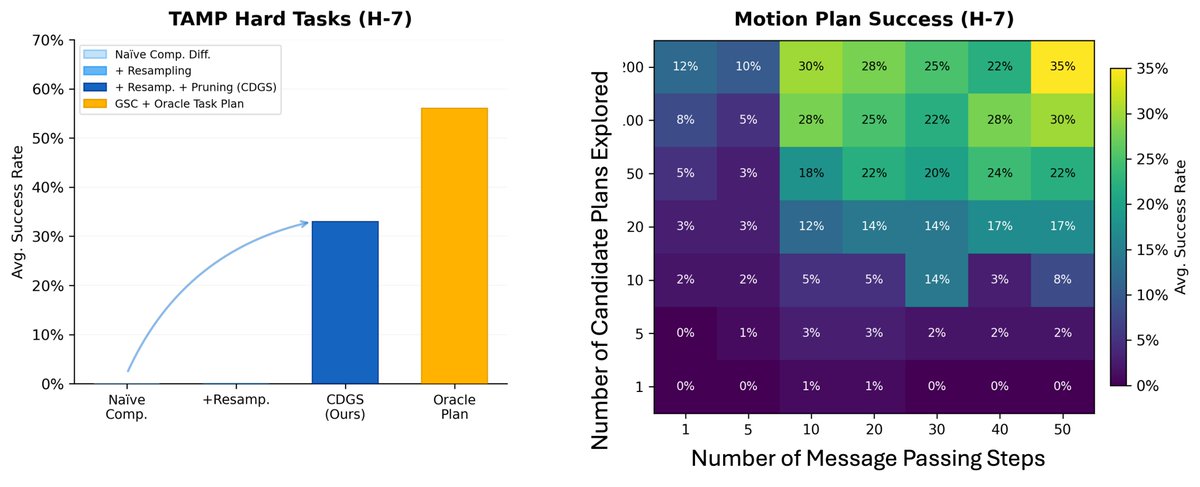
Short-horizon Foundation Models + Compositional Generative Planning + Inference-time Search = CDGS for goal-conditioned long-horizon planning!
More details: cdgsearch.github.io
🧵 below
English