Sabitlenmiş Tweet

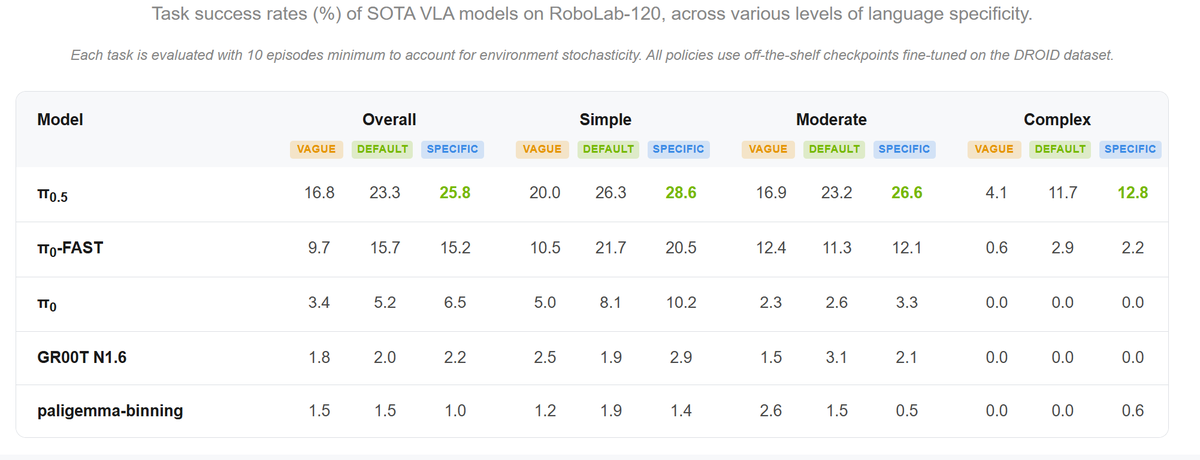
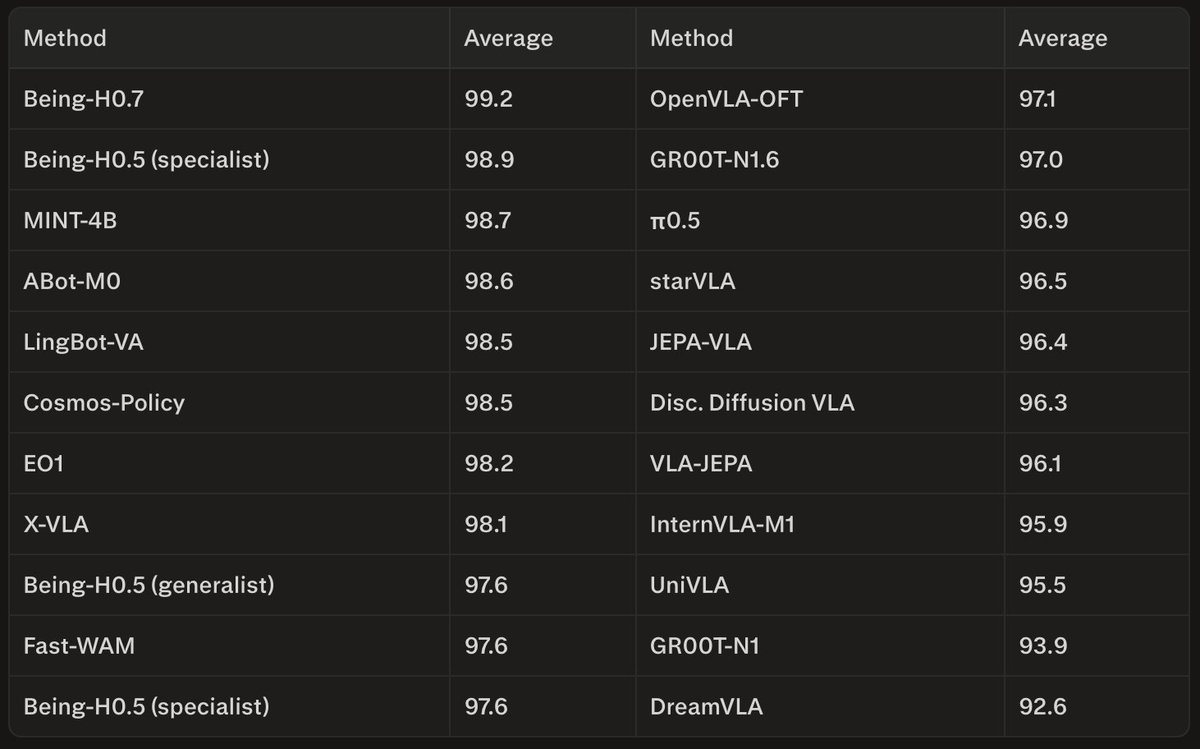
When every generalist robot model scores 95%+ on a benchmark, the numbers become meaningless.
What if we built a photorealistic benchmark that never saturates and can generate new scenes and tasks with AI Workflows in minutes?
We introduce RoboLab! 🧵(1/6)
English