Tweet fixado

David Marx (@digthatdata.bsky.social)
10.2K posts
@DigThatData
Generative AI MLE, FOSS toolmaker, innovation catalyst @CoreWeave + @AiEleuther. https://t.co/z0fpuhlWRs



Has anyone had much luck in asking o1 to first consider and reject its initial ideas? The concepts coming out of this prompt are good, but the writing isn't and the story arc is usually tame. One story was from the perspective of the imaginary number "i". > "I wish to be real," 'i' thought. > By embracing its imaginary nature, 'i' could influence reality.




found a paper proposing fast automated poincare section discovery from a single timeseries, without takens embedding. see reply for link


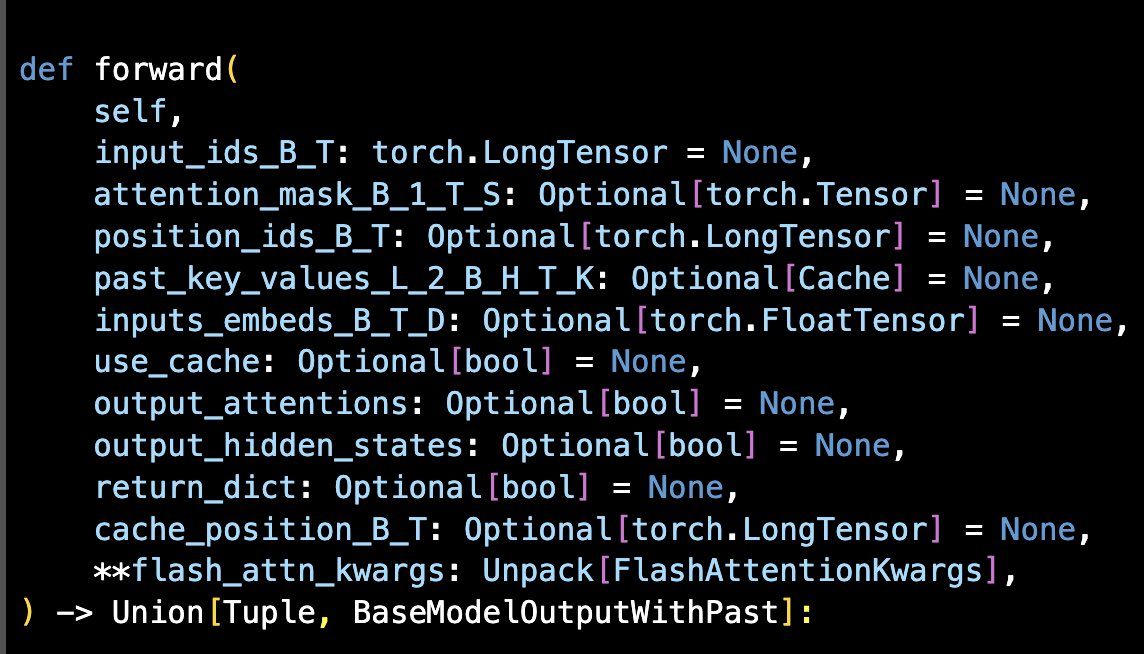
On the topic of interview questions, I think having to explain every single part of modelling_llama.py is good because - you can show that you understand basically all parts of the transformer - it shows you can work with and understand large codebases



Everything you love about generative models — now powered by real physics! Announcing the Genesis project — after a 24-month large-scale research collaboration involving over 20 research labs — a generative physics engine able to generate 4D dynamical worlds powered by a physics simulation platform designed for general-purpose robotics and physical AI applications. Genesis's physics engine is developed in pure Python, while being 10-80x faster than existing GPU-accelerated stacks like Isaac Gym and MJX. It delivers a simulation speed ~430,000 faster than in real-time, and takes only 26 seconds to train a robotic locomotion policy transferrable to the real world on a single RTX4090 (see tutorial: genesis-world.readthedocs.io/en/latest/user…). The Genesis physics engine and simulation platform is fully open source at github.com/Genesis-Embodi…. We'll gradually roll out access to our generative framework in the near future. Genesis implements a unified simulation framework all from scratch, integrating a wide spectrum of state-of-the-art physics solvers, allowing simulation of the whole physical world in a virtual realm with the highest realism. We aim to build a universal data engine that leverages an upper-level generative framework to autonomously create physical worlds, together with various modes of data, including environments, camera motions, robotic task proposals, reward functions, robot policies, character motions, fully interactive 3D scenes, open-world articulated assets, and more, aiming towards fully automated data generation for robotics, physical AI and other applications. Open Source Code: github.com/Genesis-Embodi… Project webpage: genesis-embodied-ai.github.io Documentation: genesis-world.readthedocs.io 1/n





