
@tenderizzation being a hardstuck diamond garen one-trick taught me resilience
English
david yan
71 posts
@dzyan01
phd @PrincetonVL. undergrad @princetoncs


personal news: i've joined Elorian as Chief Reasoning Architect. multimodal AGI is the most critical frontier as we move from the era of chatbots to coding agents to models that reason and act over the physical world. i'm really excited to design natively visual models across thinking, agents, architectures, and the systems stack with the amazing team at Elorian. i wish the best to everyone at xAI & SpaceX — driving posttraining was a unique experience with so many memorable stories. all the best to the team, and to Elon.







Yesterday was my last day at @LumaLabsAI. Over the last three years, I had the privilege of helping drive the company's transition from 3D AI to video generation and native multimodal foundation models. I am grateful to have worked alongside an extraordinary group of researchers, and I look forward to seeing the next chapter of the company's story unfold.

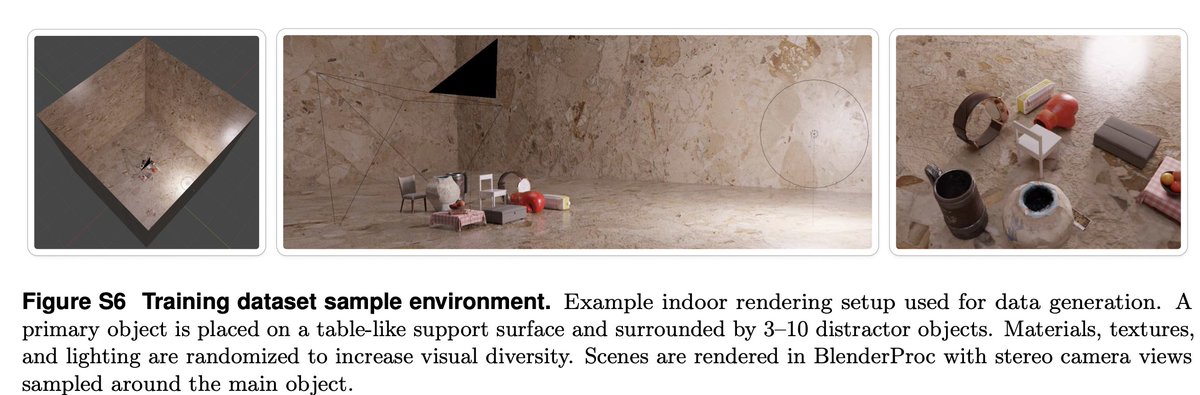
Releasing RecGen: a collaboration between @ToyotaResearch, @toyota_europe, and @UvA_Amsterdam tackling a core 3D vision challenge: reconstructing complete multi-object scenes (parts, poses, textures, even occluded geometry) from just 1 to a few RGB-D views. Trained purely on synthetic data, RecGen achieves SOTA on real-world robotics and 6D pose benchmarks, handling occlusions, symmetry, and complex interactions. A step toward scalable, high-fidelity digital twins for robotics, and better evaluation and training of generalist policies. reconstruction-by-generation.github.io

Congrats to to @cindy_x_wu on receiving an @Apple Scholars in AIML fellowship! 🍎 🎉 The fellowship recognizes doctoral students doing innovative research in machine learning and artificial intelligence. bit.ly/3OV0fyP




