Закреплённый твит

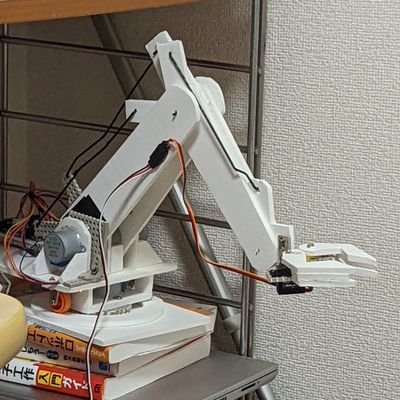
I’ve been quite busy lately developing the Humanoid autonomy stack as a member of URobotics. Now after few months of hard work, our team is excited to share a short video showcasing the Humanoid autonomy stack, H-EDK.
This is a short footage of our field locomotion demo.
English