Закреплённый твит

woooii @axisrobotics , @AxisRoboticsID susah banget njirrr ngangkat biskuit, bener bener task malam ini bikin emosi🤬
Indonesia
EnpiciFi (✱,✱)
1.8K posts
@masssnpc
Changing minds, leaving marks Garbage Boy at @PrismaXai | Contributor at @axisrobotics
Wahai penghuni komunitas @axisrobotics @AxisRoboticsID , udah beres kah task “Booster grasp cube into basket”? share dong pengalaman kalian Music: Daylight by @maroon5


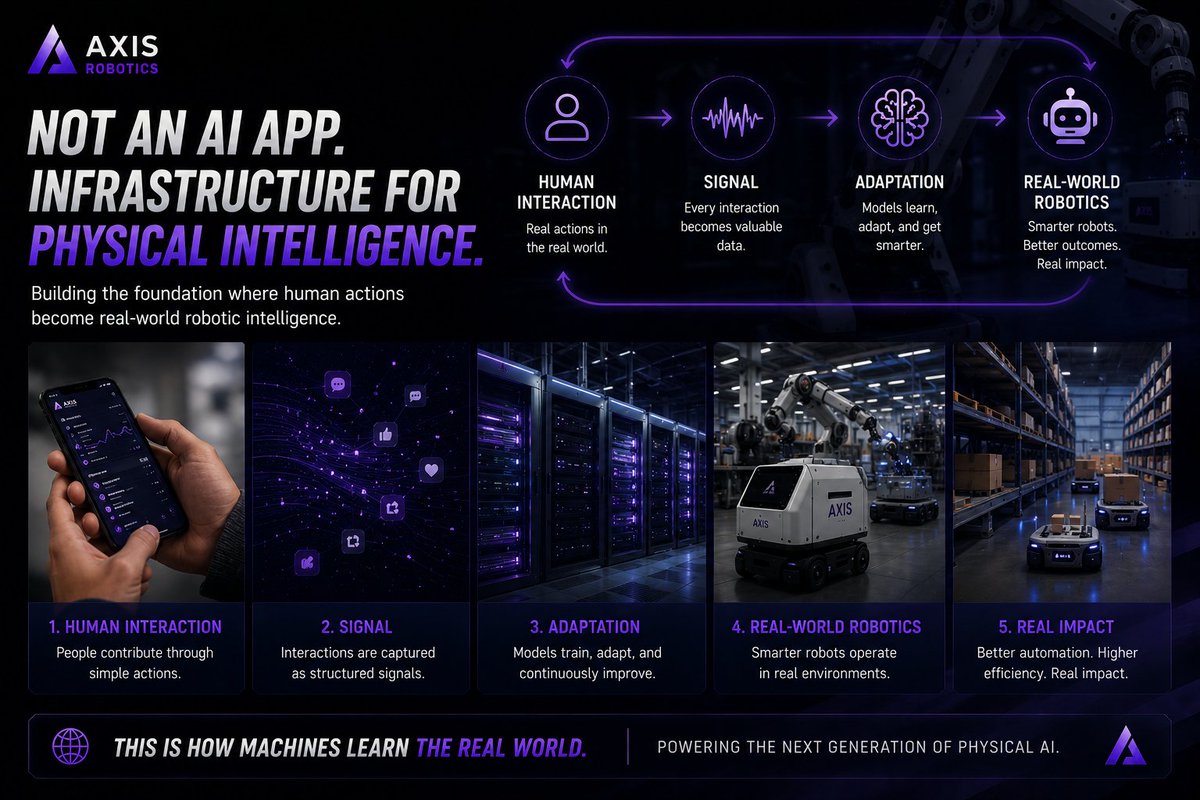
Together, we train smarter systems for a smarter future 🌍🤖 @axisrobotics



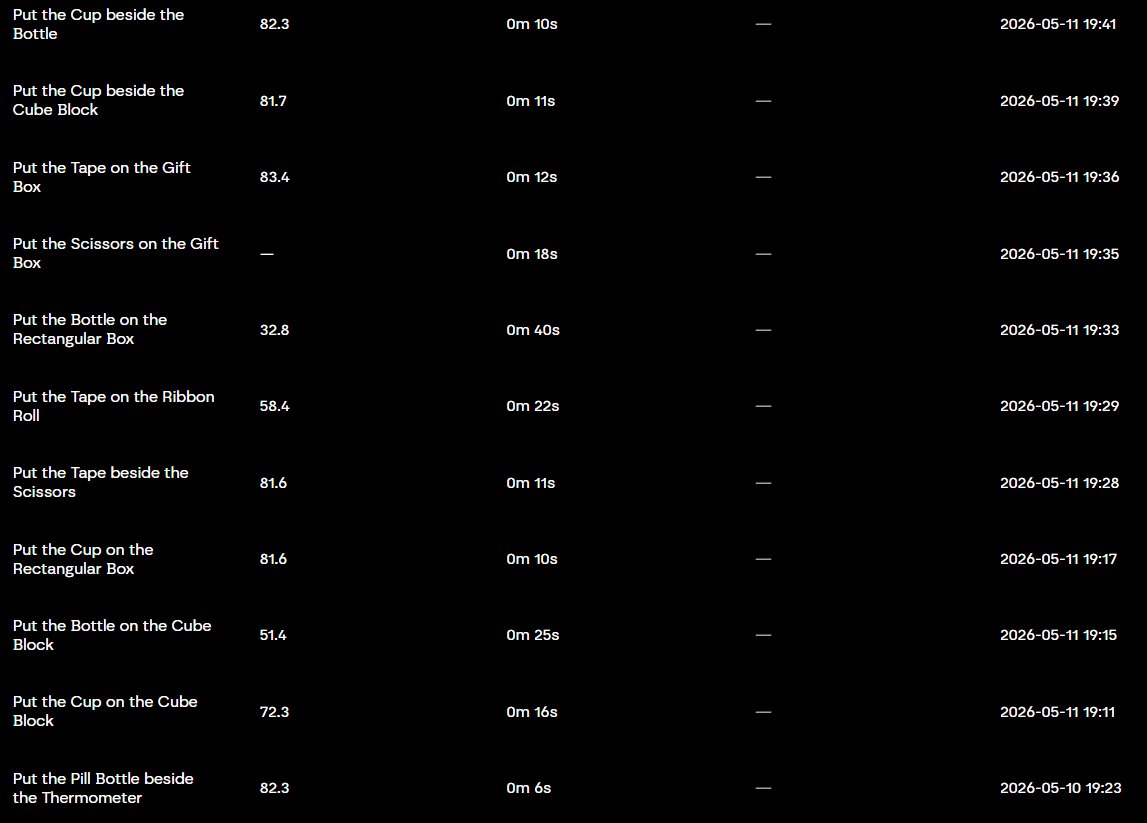
Kalau deskripsi objek dan aset aktual terasa tidak selalu sama, sekarang alasannya sudah lebih jelas. @axisrobotics sedang membangun keragaman data lewat in task randomization, supaya model belajar pada tujuan tugas, bukan cuma pada satu bentuk objek yang berulang.

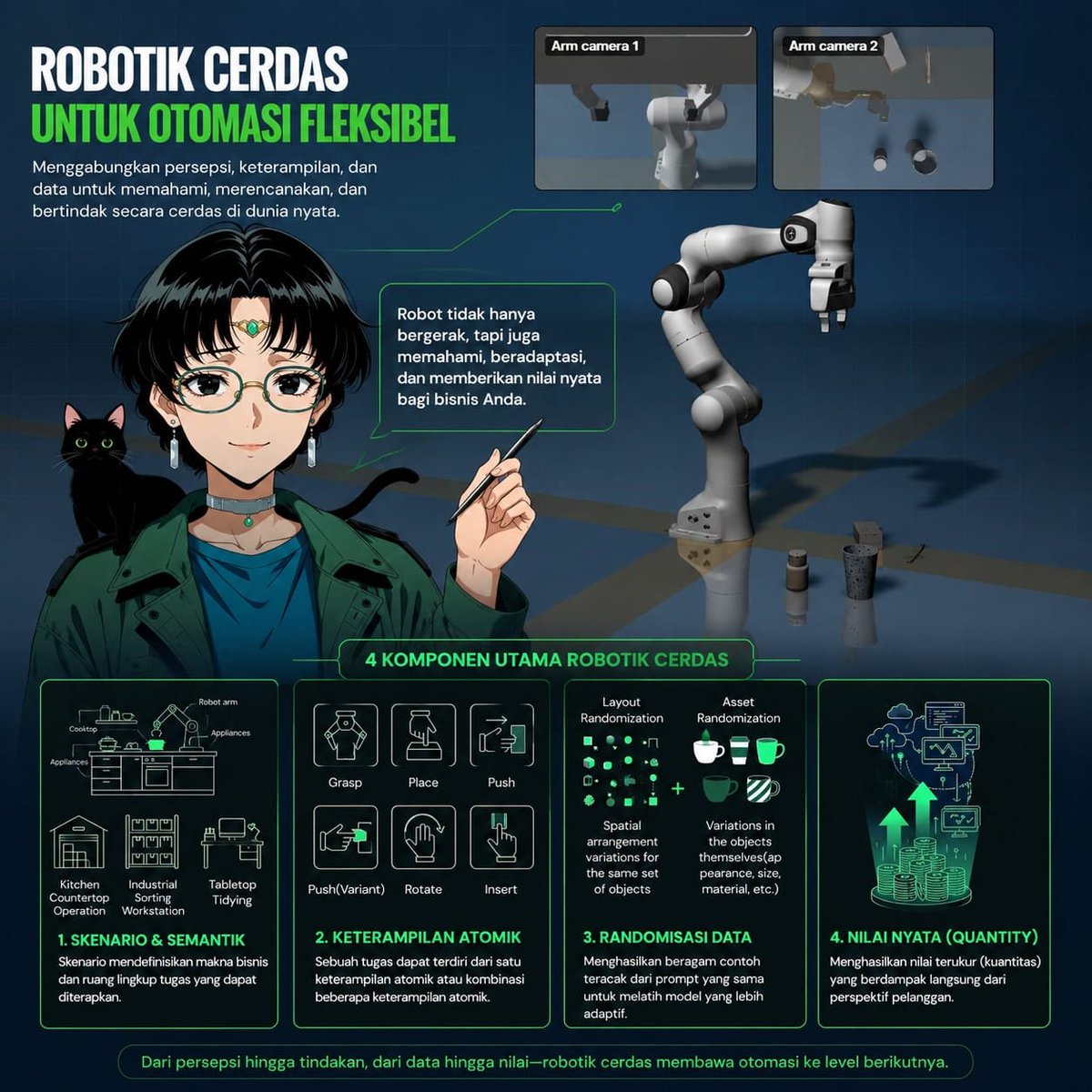
Noticed that object descriptions and reference images sometimes don't perfectly match the actual assets spawned in a task? This is because we’ve rolled out in-task randomization to increase data diversity and improve model generalization. The actual assets may vary, but the task goal always remains the same. Please focus on the task goal rather than the specific assets. Rich scenarios, diverse combinations of atomic skills, and extensive in-task randomization build the diversity of our data.


Noticed that object descriptions and reference images sometimes don't perfectly match the actual assets spawned in a task? This is because we’ve rolled out in-task randomization to increase data diversity and improve model generalization. The actual assets may vary, but the task goal always remains the same. Please focus on the task goal rather than the specific assets. Rich scenarios, diverse combinations of atomic skills, and extensive in-task randomization build the diversity of our data.


Over a month ago, we open-sourced our task generation pipeline. Since then, we’ve run countless trials, hardened the infra, and are getting ready to ship the full stack. Here is a raw look at our asset generation pipeline 🧵

Skala memang penting, tapi robot tidak belajar dari data mentah begitu saja. @axisrobotics berusaha membuat trajectory yang sudah dibersihkan, dirapikan, dan dibuat cukup stabil untuk benar-benar dipakai.






We are now open-sourcing the AxisDataCleaning pipeline. Github repo: github.com/AxisAIOrg/Axis… Browser teleoperation is one of the most scalable paths for robot data generation. Raw human input, however, is not yet model-ready: ▪️ Idle pauses ▪️ Micro-jitters ▪️ Low & Variable frame rates Raw web data alone is not enough for reliable policy training. Here is how our backend turns noisy human demonstrations into usable trajectories for downstream policy training. 🧵👇
