
Azka Ramdani
186 posts


First wave of Hantavirus closed
16,748 survivors
First-wave survivors must pass the anti-bot check in the second wave.
Second wave dropping in a few hours.

English
@batikaneth @unipixnft Hope i got bless this times
0xe23b09c4dcd07c9ee2200f350c553b8a8779aa1d
English
Azka Ramdani retweetledi

UniPix NFT Giveaway 🦄
Freemint - 1111 Supply on ETH
I'm giving away 2 GTD wl & 10 FCFS wl
To enter:
- Follow: @batikaneth & @unipixnft
- Like + RT this post
- Drop your evm address
48 hours

English
Proc4Gem explores a big idea for robotics:
What if robots could learn from endlessly generated environments instead of fixed datasets?
Procedural generation → scalable robot training.
Physical AI is starting to train like game worlds.
@axisrobotics

English
One surprising finding in robotics:
More demonstrations ≠ better policies.
Axis Robotics found that ~40–60 diverse, high-quality demos can already fine-tune usable robot behaviors for tabletop tasks.
@axisrobotics

English

Intelligence systems are built from millions of simple actions, signals, and continuous learning @axisrobotics

Cassandra Nicholson (❖,❖)@sanwahm
Together, we train smarter systems for a smarter future 🌍🤖 @axisrobotics
English
Indonesia

Wahai penghuni komunitas @axisrobotics @AxisRoboticsID , udah beres kah task “Booster grasp cube into basket”? share dong pengalaman kalian
Music: Daylight by @maroon5
Indonesia
Azka Ramdani retweetledi

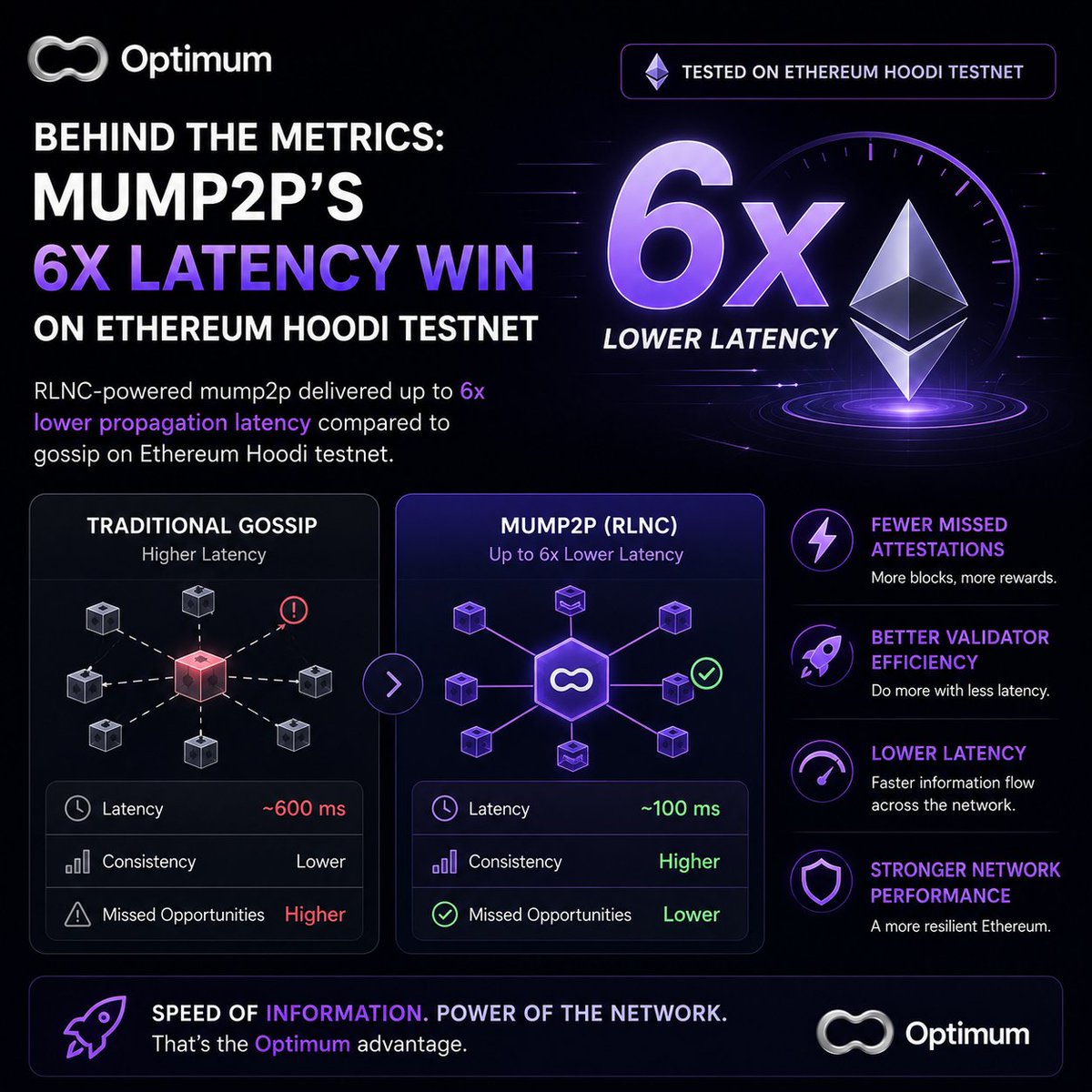
Optimum achieved up to 6x lower propagation latency on Ethereum Hoodi testnet.
Faster data flow = better validator performance.
Underrated infra layer.
Speed of information matters.
@get_optimum
English
@axisrobotics is moving beyond scripted policies.
New embodied AI papers are pushing toward:
• reasoning + action models
• multimodal robot learning
• scalable synthetic data
• general-purpose robot control
The trend is clear:
Physical AI is becoming foundation-model driven.

English
Robots shouldn’t memorize environments.
Axis Robotics uses in-task randomization:
different objects, same task goal.
That diversity helps robot policies generalize to the real world instead of overfitting to one setup.
@axisrobotics
Axis Robotics@axisrobotics
Noticed that object descriptions and reference images sometimes don't perfectly match the actual assets spawned in a task? This is because we’ve rolled out in-task randomization to increase data diversity and improve model generalization. The actual assets may vary, but the task goal always remains the same. Please focus on the task goal rather than the specific assets. Rich scenarios, diverse combinations of atomic skills, and extensive in-task randomization build the diversity of our data.
English
@NJakecon92504 @axisrobotics Real-world robotics needs adaptable intelligence, not scripted behavior.
English

@axisrobotics this creates a continuous loop: humans contribute → ai learns → robots improve → real-world impact grows. more signals mean smarter and more adaptive systems.
@axisrobotics
English

We are now open-sourcing the AxisDataCleaning pipeline.
Github repo: github.com/AxisAIOrg/Axis…
Browser teleoperation is one of the most scalable paths for robot data generation. Raw human input, however, is not yet model-ready:
▪️ Idle pauses
▪️ Micro-jitters
▪️ Low & Variable frame rates
Raw web data alone is not enough for reliable policy training.
Here is how our backend turns noisy human demonstrations into usable trajectories for downstream policy training. 🧵👇

Axis Robotics@axisrobotics
Over a month ago, we open-sourced our task generation pipeline. Since then, we’ve run countless trials, hardened the infra, and are getting ready to ship the full stack. Here is a raw look at our asset generation pipeline 🧵
English

Physical AI bukan sekadar kecerdasan buatan ini adalah teknologi yang bisa bergerak, bekerja, dan membantu manusia di dunia nyata.
Mulai dari robot, drone, hingga mesin pintar, semuanya dirancang untuk membuat pekerjaan lebih cepat, aman, dan efisien. @axisrobotics

Indonesia
Kalian tim yang mengerjakan yang gampang dulu atau mengerjakan yang sulit dulu?
Me: yang gampang dulu
@AxisRoboticsID @axisrobotics
Indonesia
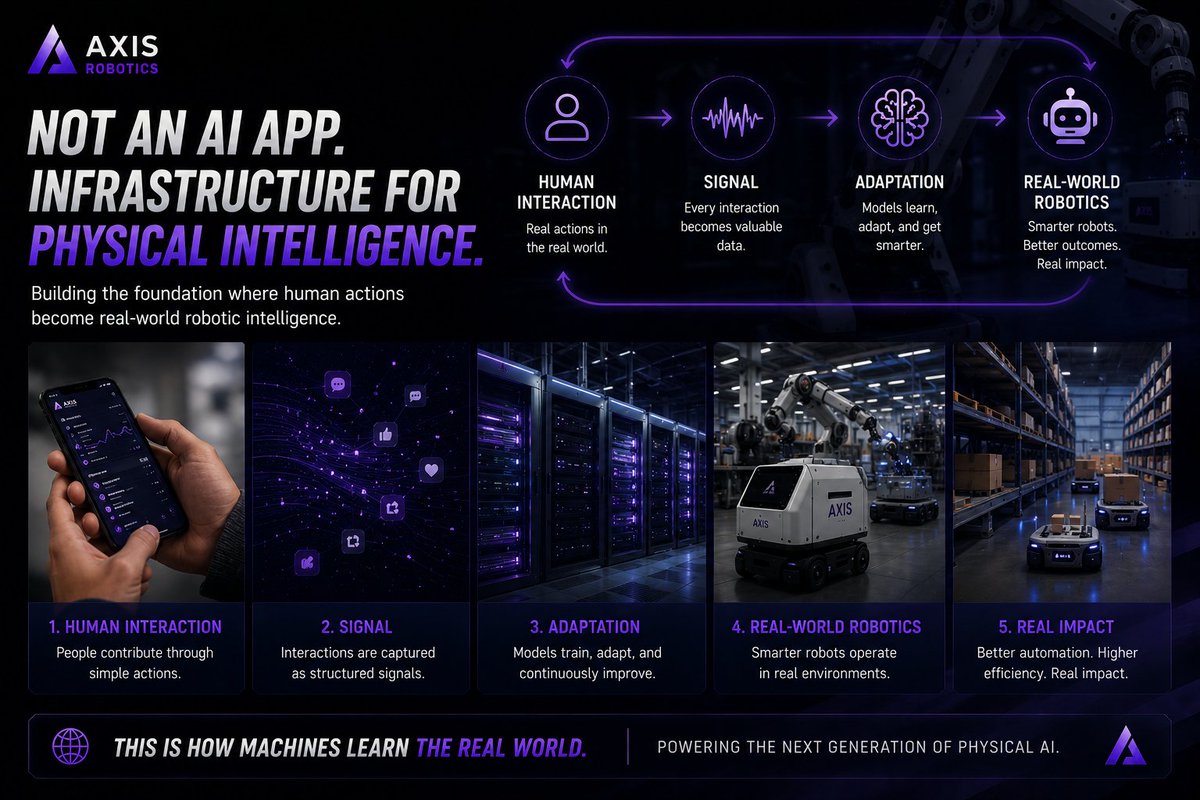
axis isn’t building another ai app.
they’re building infrastructure for physical intelligence.
every human interaction becomes signal.
every signal trains adaptation.
every adaptation improves real-world robotics.
this is how machines learn the real world.
@axisrobotics
English

Yang ngerasa benda benda di task beda beda atau gak cocok itu benerrr
Tapi, itu bukan bug ternyata wkwkkw
Emang dibuat gitu
Axis pake sistem In-Task Randomization biar robotnya tambah belahar dan pinter pake macem macem data.
Terus apa itu In-Task Randomization?
Biasanya, dalam sebuah task, objek yang muncul selalu sama persis dengan gambar referensi.
Dengan fitur ini, aset visual (warna, bentuk, bahan) dan tata letak (posisi objek) akan berubah secara acak setiap kali tugas dimulai.
Jadiii, gausah protes lagii yaa kalo beda itemnya wkwkwkw
Axis Robotics@axisrobotics
Noticed that object descriptions and reference images sometimes don't perfectly match the actual assets spawned in a task? This is because we’ve rolled out in-task randomization to increase data diversity and improve model generalization. The actual assets may vary, but the task goal always remains the same. Please focus on the task goal rather than the specific assets. Rich scenarios, diverse combinations of atomic skills, and extensive in-task randomization build the diversity of our data.
Indonesia
@tenacious_ar @unipixnft LFG!!
0xe23b09c4dcd07c9ee2200f350c553b8a8779aa1d
Suomi
Azka Ramdani retweetledi

I’m giving away 15 WL spots for Unipix
1111 Supply • Free Mint on ETH Chain
To enter:
• Follow me & @unipixnft
• Like + RT this post
• Drop your address
Winners will be announced in 48 hours

English
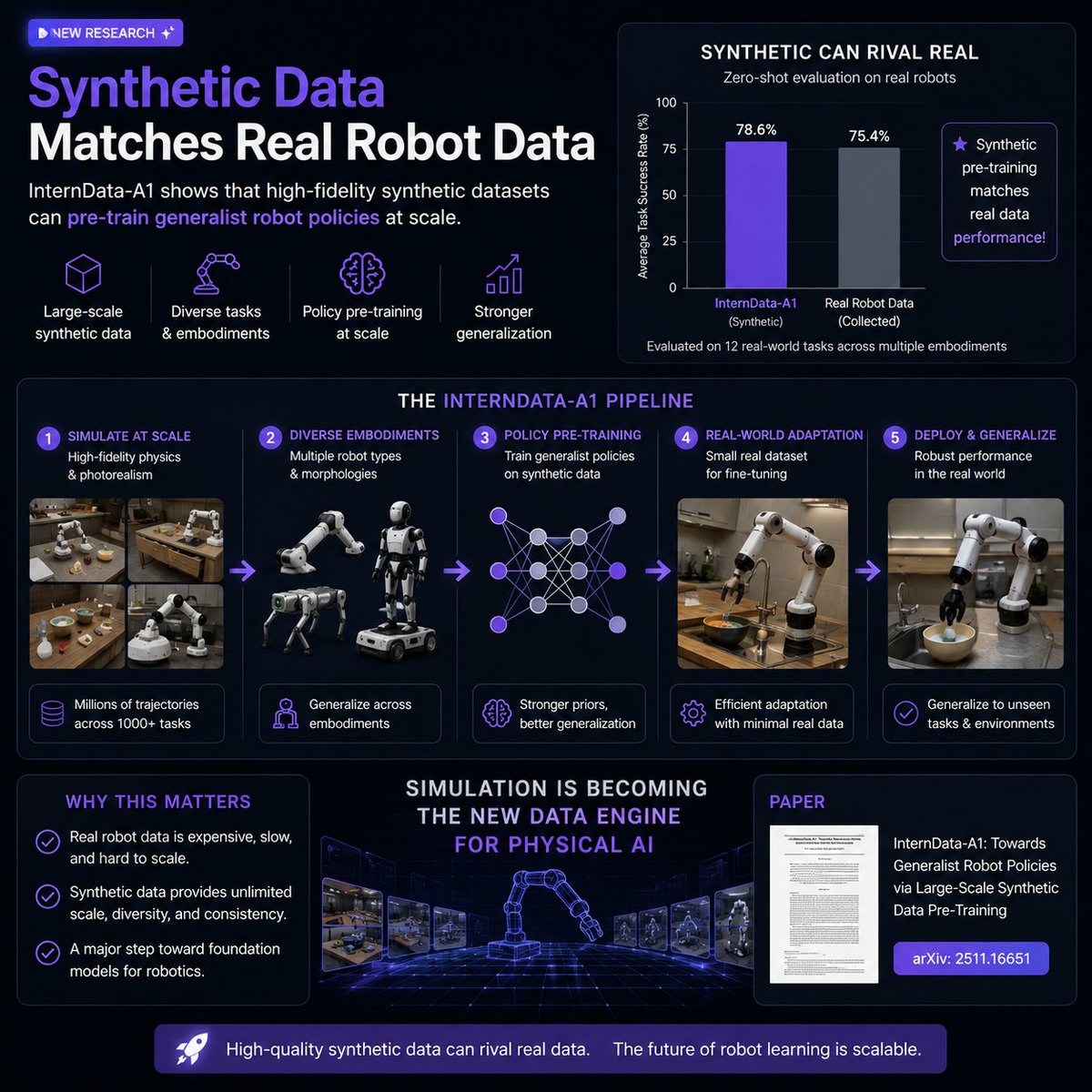
Synthetic data is starting to rival real robot data.
The InternData-A1 paper shows that high-fidelity synthetic datasets can pre-train generalist robot policies at scale.
Big shift for robotics:
less dependence on expensive real-world collection.
@axisrobotics
English