Angehefteter Tweet

🌎World models can predict, but controlling real robots from imagination sees a long-standing failure due to hallucination.
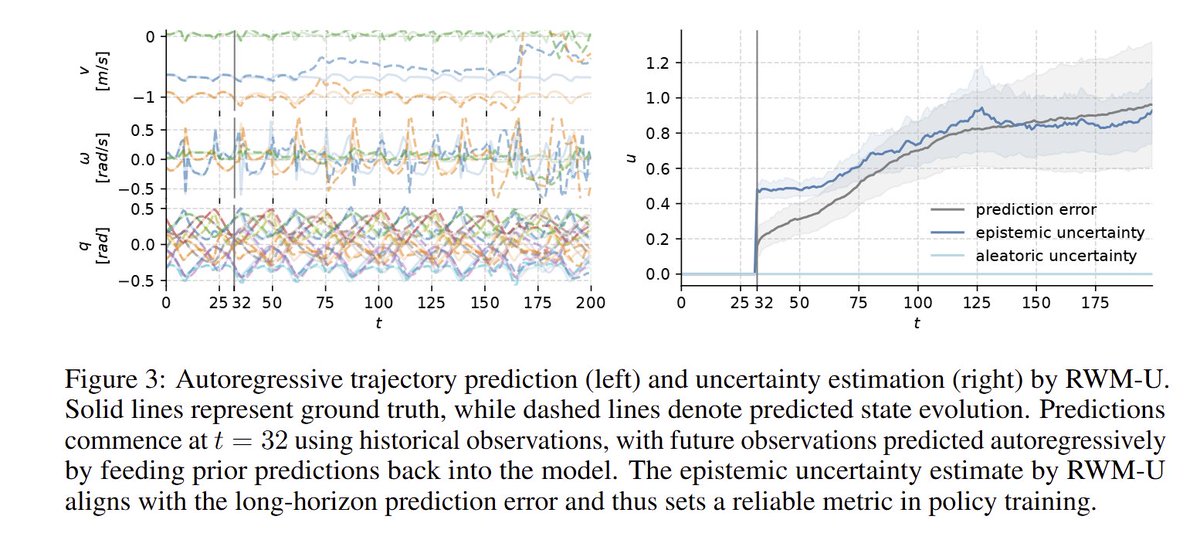
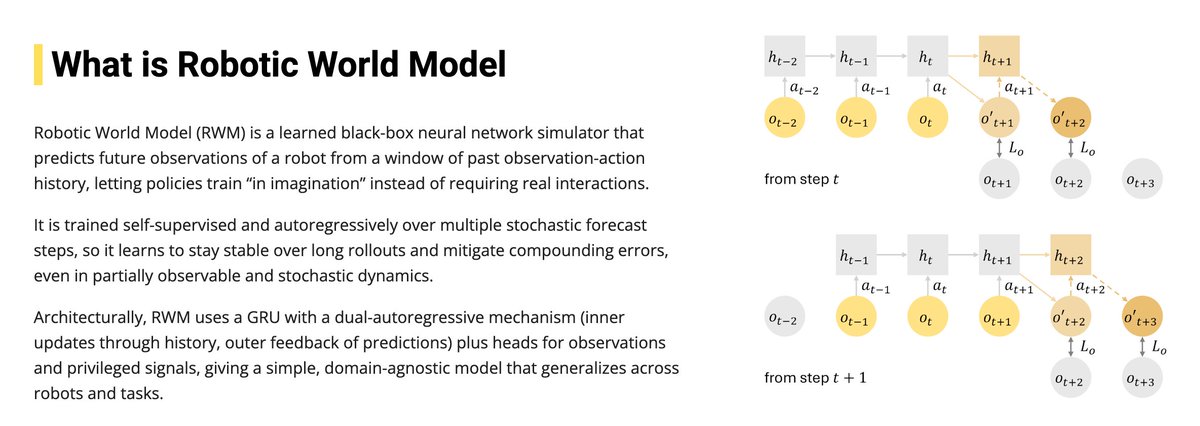
🧠Introducing Uncertainty-Aware RWM: a black-box, end-to-end neural dynamics model with long-horizon uncertainty propagation.
🎯sites.google.com/view/uncertain…
English