Sabitlenmiş Tweet

🚀 I'm excited to share our new paper: SegDAC: Segmentation-Driven Actor-Critic for Visual Reinforcement Learning
🧠 SegDAC combines large vision models with online RL to reason about its environment at the object and sub-object level, avoiding noisy pixel-level reasoning.
🛠️ Using YOLO-World and SAM, SegDAC breaks the scene into semantically meaningful segments and learns to attend to a variable number of segments and proprioceptive signals, focusing on the most relevant information to complete the task.
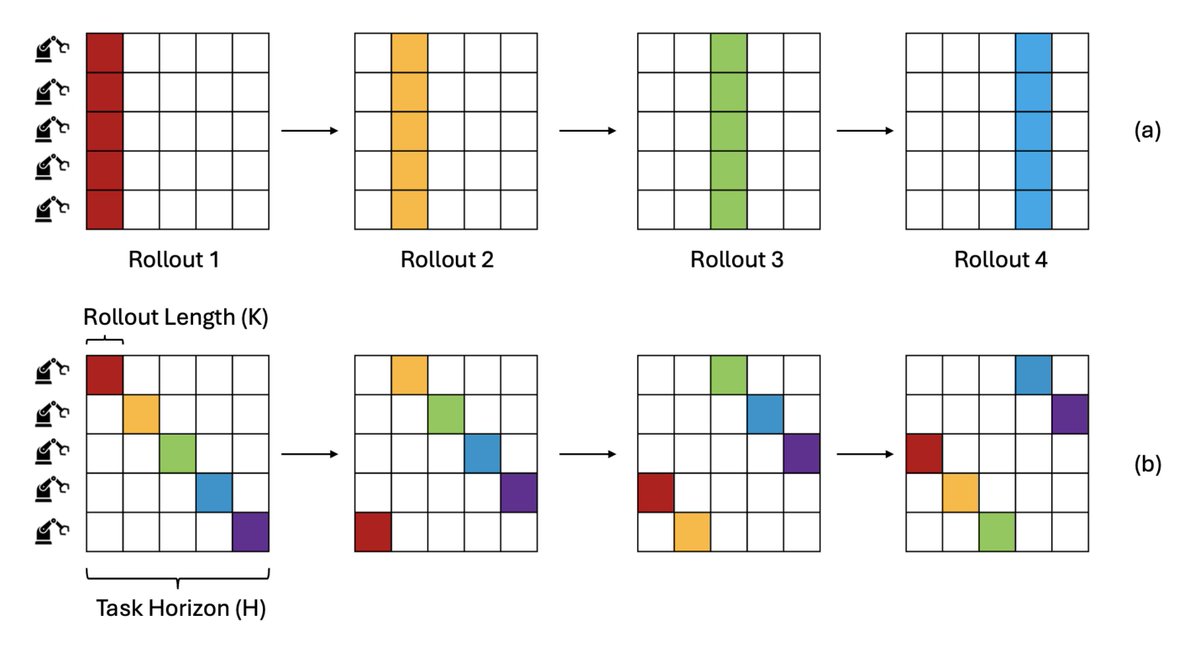
⚡ Trained purely with online RL, without human labels or demonstrations.
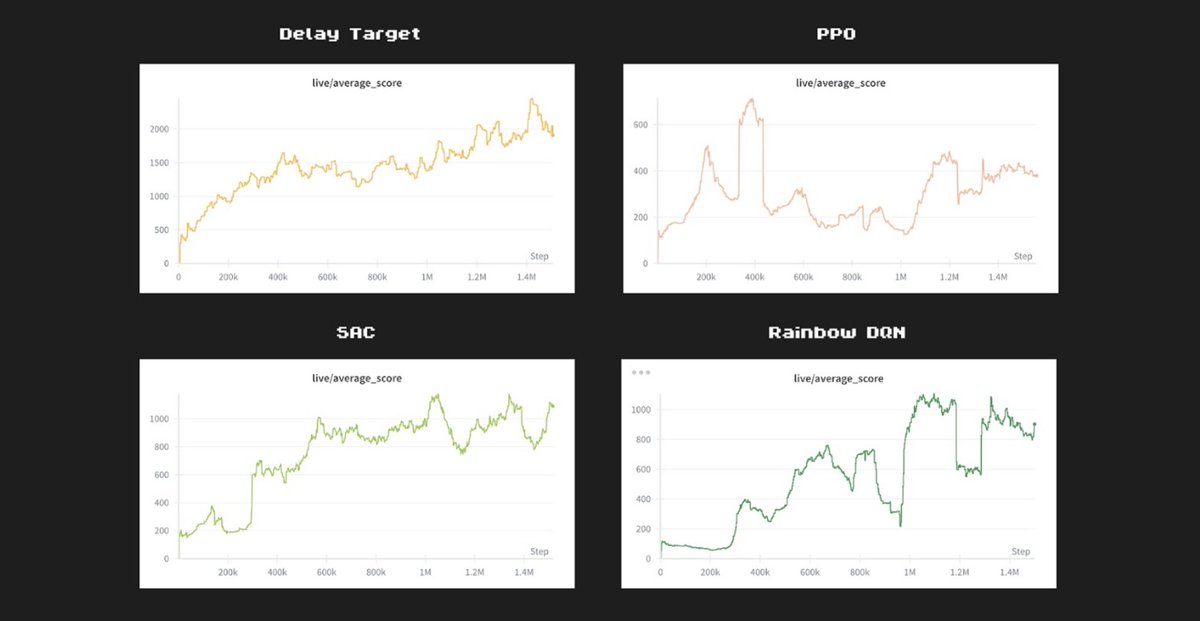
🏆 Outperforms previous online RL state-of-the-art methods across all difficulty levels on our challenging visual generalization benchmark, with up to 2x better visual generalization in the hardest setting.
📄 Paper: arxiv.org/pdf/2508.09325
🌐 Project Page: segdac.github.io
Work done with @GlenBerseth at @Mila_Quebec
#ReinforcementLearning #RobotLearning #ArtificialIntelligence #Robotics
English