Sabitlenmiş Tweet

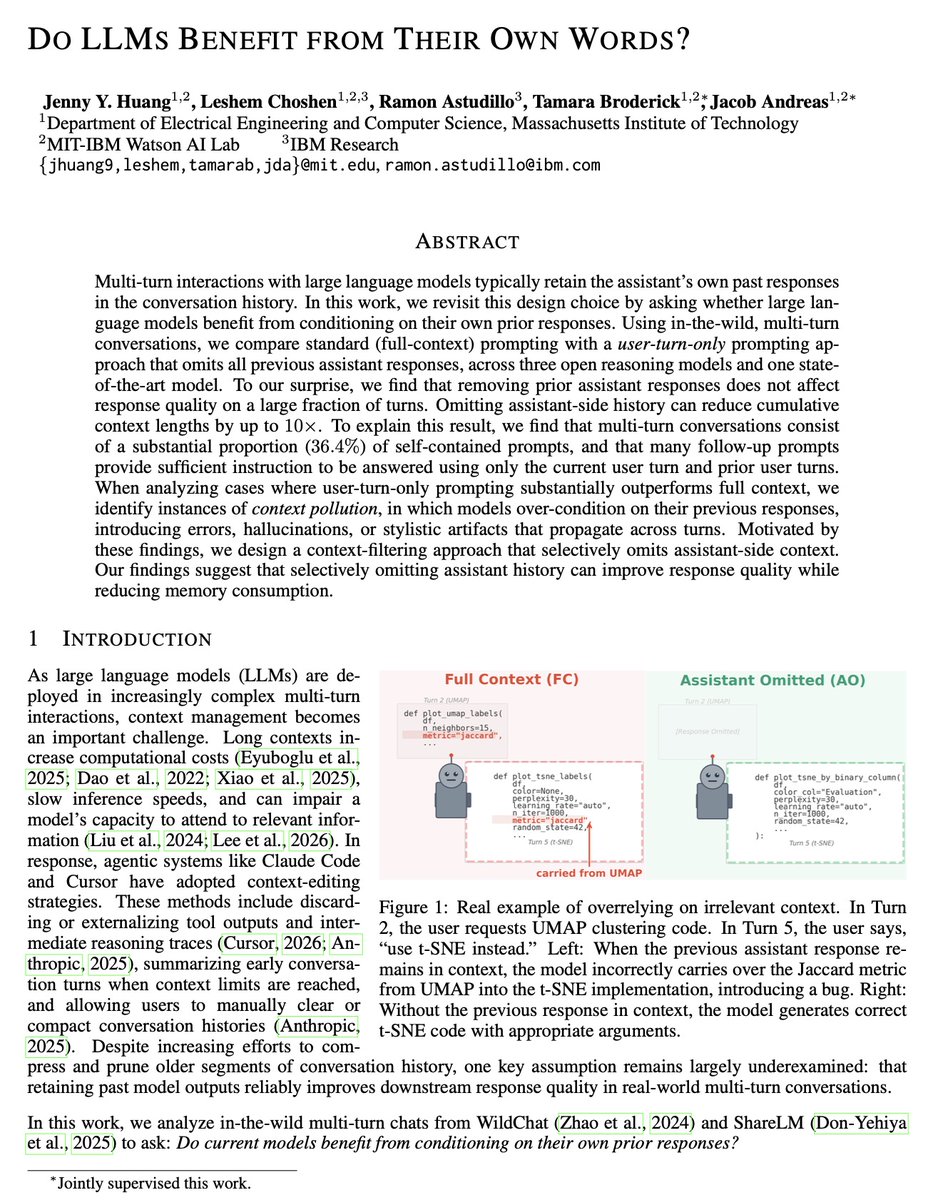
Meet SceneSmith: An agentic system that generates entire simulation-ready environments from a single text prompt.
VLM agents collaborate to build scenes with dozens of objects per room, articulated furniture, and full physics properties.
We believe environment generation is no longer the bottleneck for scalable robot training and evaluation in simulation.
Website: scenesmith.github.io
👇🧵(1/8)
English