Sabitlenmiş Tweet
NWK/野分機械
3.6K posts


NWK/野分機械
@RoboSafs01075
制御・構造・デザインを一体として考える個人ヒューマノイドロボッ卜製作者 ロマンを追い求めて | https://t.co/ErjtxfPSRw | https://t.co/moEltFsdFd やったこと#ホビロボ制御 ※発言は所属組織とは無関係
日本のどこか Katılım Ekim 2021
880 Takip Edilen2.6K Takipçiler

NWK/野分機械 retweetledi

@Type_rion 小学生のころ親に連れていって貰った記憶があります!
確か、お台場潮風公園→静岡(ビームサーベル追加)→お台場ダイバーシティみたいな感じだったかと…!
gigazine.net/news/20090718_…
日本語

潮風公園にガンダム居た事あったの今知った
マジか
NWK/野分機械@RoboSafs01075
ついに終わってしまうのか… 今までありがとうございました。 潮風公園時代~ダイバーシティ時代含めた初代ガンダムより長かったのでは?
日本語
@lambda_robot なるほどです!確かに、ポリシーに与える情報量を増やすのはギア比関係なく本質かもしれないですね
将来のQDD機に向けた知見を貯めてしまった…!
日本語

@RoboSafs01075 だんだん小動物的な動きになってきた!
QDDでもその考え方有効だと思います。特に2足だとスティフネスはある程度上げないと立てないのは一緒だし。
日本語
改めて考えたんだけど
関節角履歴は、関節速度と比較実験したわけではないが、論理的には高減速サーボ系のS2Rには有効かも
速度は瞬間の接線だが、履歴は直近の関節角波形なので、policyが加減速・位相・遅れを暗に読める可能性がある、、、かも(増やせば増やすほど情報量が多い)
NWK/野分機械@RoboSafs01075
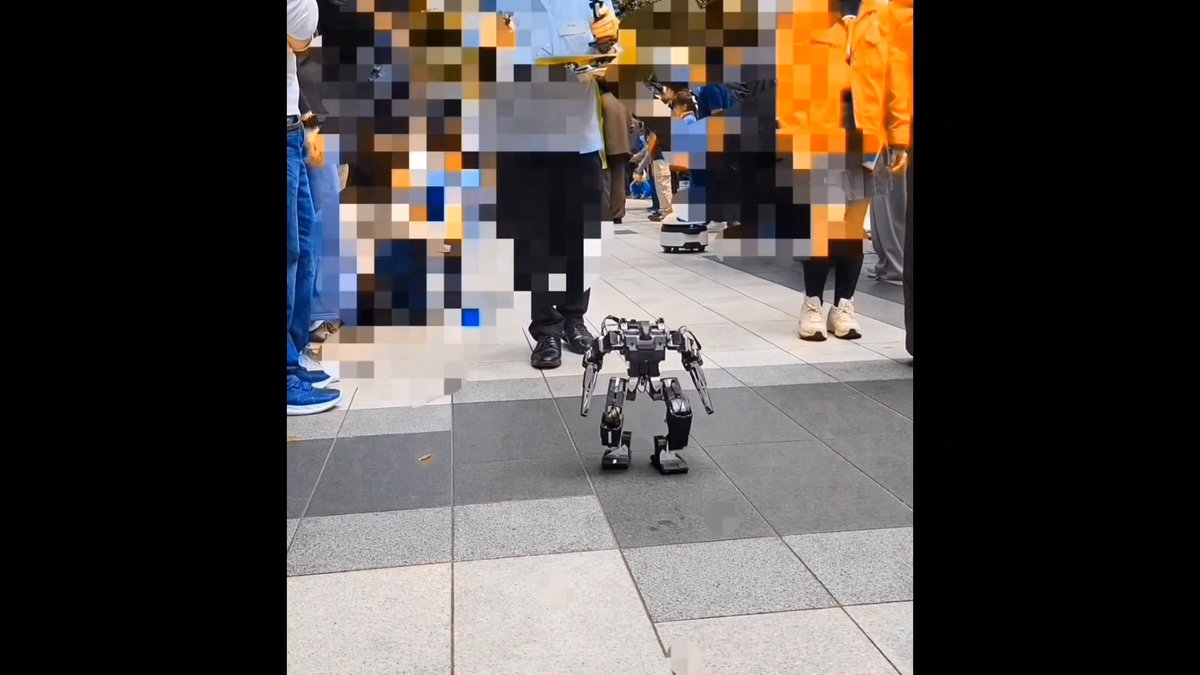
模倣強化学習のobsに関節角履歴(5step分)を入れたら、Sim2Real時の挙動がかなり滑らかになった。 一方で、ゼロコマンドでもその場足踏みするように。simでも再現し、参照軌道は静止しているので、policyが「静止時足踏み」という安定解を選んだ模様。 #ホビロボ制御 #Sim2Real
日本語
関節角履歴でSim2Realの挙動が滑らかになった一方、ゼロコマンドでも足踏みする件、原因を見直すと「静止時足踏みを学んだ」というより、そもそも学習中に完全ゼロコマンドがほぼ出ていなかった可能性が高い。
観測を良くしたら、今まで見えてなかったコマンド分布の穴が出てきた感じ。
NWK/野分機械@RoboSafs01075
模倣強化学習のobsに関節角履歴(5step分)を入れたら、Sim2Real時の挙動がかなり滑らかになった。 一方で、ゼロコマンドでもその場足踏みするように。simでも再現し、参照軌道は静止しているので、policyが「静止時足踏み」という安定解を選んだ模様。 #ホビロボ制御 #Sim2Real
日本語