Mr Thompson retweetledi
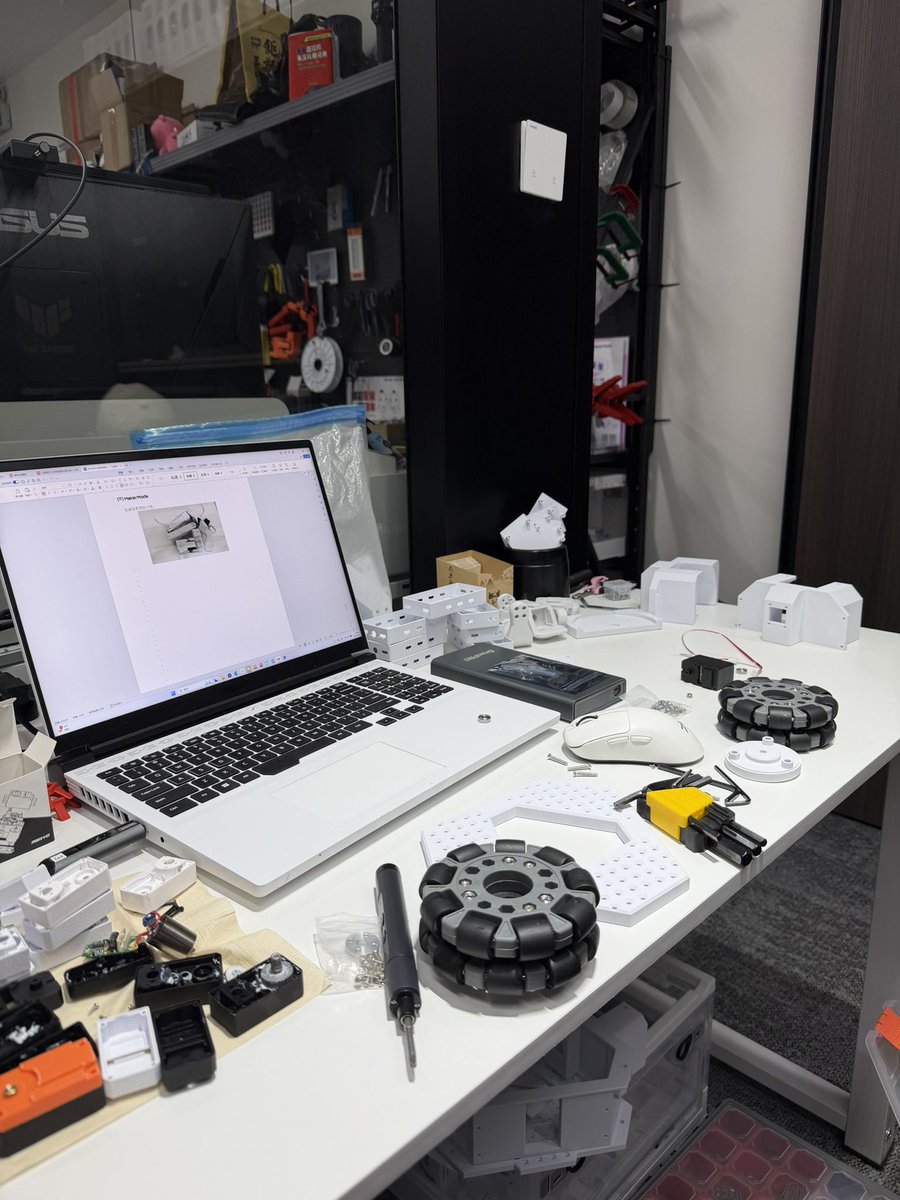
After building 25+ XLeRobots for hackathons, we redesigned almost every structural part except the arms and head.
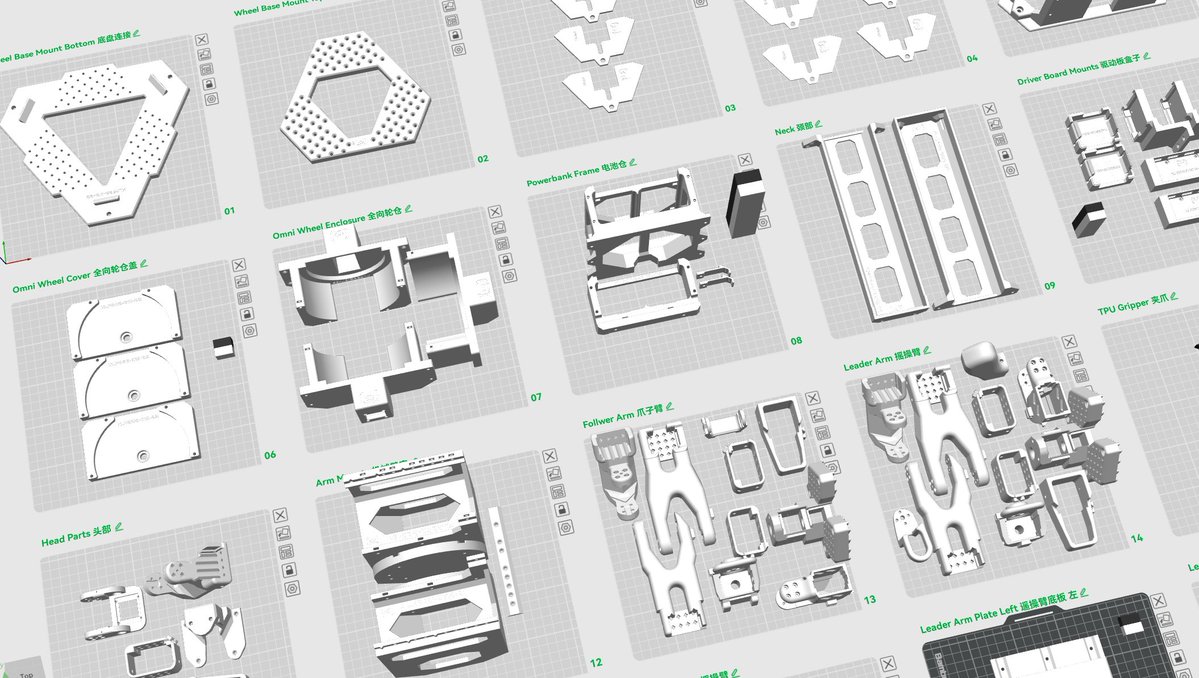
And we’re open sourcing the hardware upgrade behind our XLeRobot build.
It’s the actual internal print file we use for customer builds and hackathons.
We made it:
Easier to print - complete .3mf with tested on Bambu P1S/P2S/H2S/H2D.
Easier to build - square side-loaded nut traps that don't fall out during disassembly, snap-on driver board covers (no tools), dedicated USB hub mounts for clean cable routing, quick-release power bank mount, etc.
More stable base - bearing-supported omni wheel modules so the axle is loaded from both sides, replacing the stock LeKiwi chassis that wobbles under full XLeRobot weight.
Thanks to:
@IsaacSin12 @ThomasSchicksal @xu280589 @QILIU9203 @VectorWang2 @LeRobotHF
GitHub repo in reply. Technical specs in thread.
Here is what we updated:
English