Sabitlenmiş Tweet

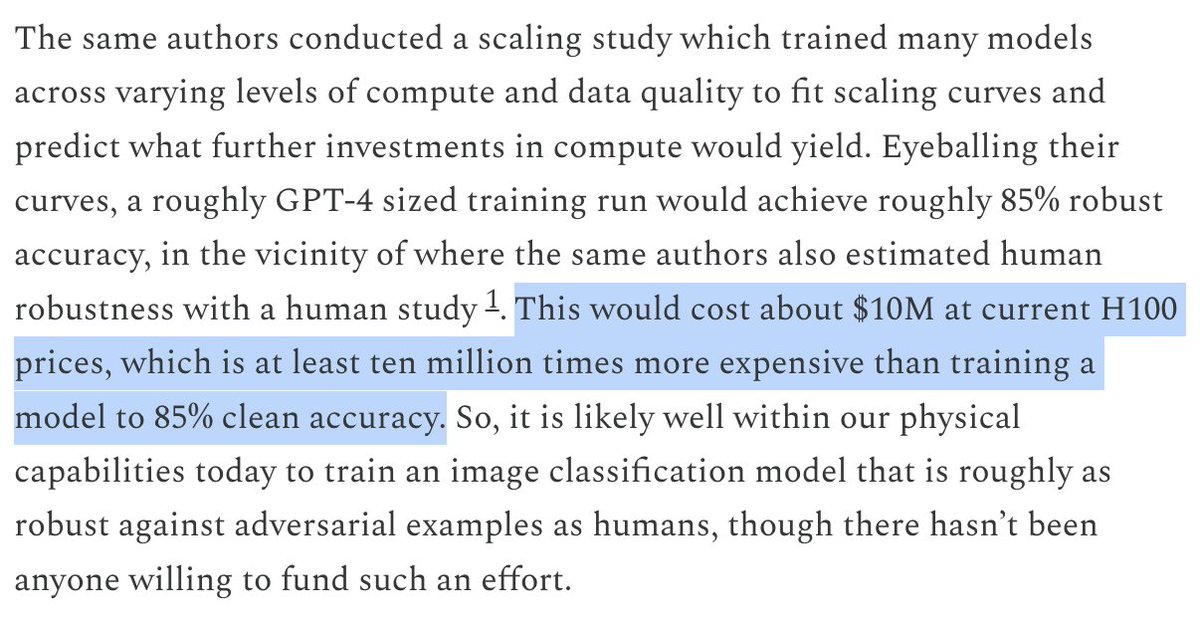
At ICML 2024, we introduced the first scaling laws for adversarial training, improving the *train-time compute* for robustness tradeoff (arxiv.org/abs/2404.09349).
At ICLR 2026, we show how to trade *test-time compute* for robustness efficiently.
x.com/i/status/20374…
Brian Bartoldson@bartoldson
Give an LLM a spec: more reasoning ➡️ better spec satisfaction. Even on adversarially attacked data. But reasoning benefits fade if attacks are stronger (e.g. white-box or multimodal). Our hypothesis suggests reasoning can stop such attacks. Toy example in the video. 🧵
English