Sabitlenmiş Tweet

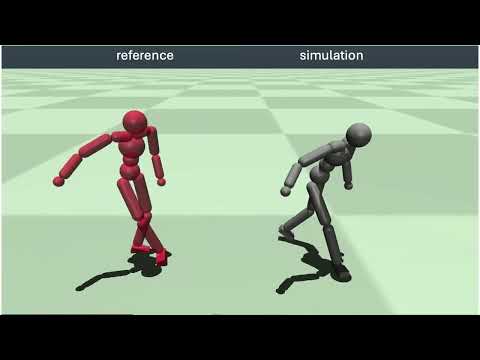
🎮Happy to share crl-humanoid-ros, a flexible ROS2 framework for test sim-to-sim and sim-to-real for robot policies with transitions in a finte state machine.
We support Unitree G1 and Limx Tron1 currently, but happy to integrate more platforms. 🤖 We support deploying both C++ (onnx) and Python controllers.
Project website: github.com/catachiii/crl-…
English