Dylan Thuras retweetledi
Dylan Thuras
1.3K posts


Dylan Thuras
@dylanthuras
Founder of Atlas Obscura. Father of two maniacs. Up for adventures, but with an earlier bedtime than previously...
Rosendale, NY Katılım Ağustos 2010
1.8K Takip Edilen1.6K Takipçiler


Dylan Thuras retweetledi

ORCA Dexterity just open-sourced 3 anthropomorphic robotic hands, tendon-driven with self-dislocating joints for reliability.
3D-print the free STL files, add off-the-shelf motors, assemble in under 8 hours for ~$2,200, and you have full hardware for dexterous manipulation research in any lab.
One of their variants is the orcahand touch. It comes with up to 83 taxels per fingertip, 1mm resolution, and 0.1N force detectability.
ORCA Dexterity@orcahand
it's time to drop three new #opensource robotic hands! this time with tactile sensors! Tweak it, 3D print it, and use them in your robotics and physical AI research! Here are some wild examples ↓↓↓
English
Dylan Thuras retweetledi

Imagine sideshows where the spectators use these to take out self-driving cars
chiefofautism@chiefofautism
someone built a $96 3D-PRINTED MANPADS rocket that recalculates its mid-air trajectory using a $5 sensor and piano wire its called Project Canard it integrates with distributed camera nodes to triangulate airborne targets and update flight paths in real-time it proves the barrier to advanced hardware has completely collapsed, moving precision weapons from defense labs to consumer garages the entire launcher and interceptor frame is 3D printed in PLA and runs off a standard off-the-shelf ESP32 microcontroller it even spins up a local Wi-Fi network so you can monitor live telemetry and arm the system directly from your laptop
English
Dylan Thuras retweetledi

The key thing is that many agents interacting with one another on the open web will have a genuinely biological/ecological complexity to it. This feature of the near future is closer to “a new kind of rainforest” than it is to the determinism typically associated with machines.
Alan Chan@_achan96_
Pretty crazy way in which agents could maintain state on the internet, found by Anthropic when investigating Opus 4.6's eval awareness
English
Dylan Thuras retweetledi


Dylan Thuras retweetledi

Long ago, someone took a cassette tape of Alvin & Chipmunks pop covers, slowed it down to 1/8th speed, and revealed the most important goth-postpunk album ever recorded. Gone for many years, it's back on YouTube again. You must hear this landmark: youtube.com/watch?v=CSqnbm…

YouTube
English
Dylan Thuras retweetledi

New ad by the Norwegian Consumer Council: "A Day in the Life of an Ensh*ttificator"
English
Dylan Thuras retweetledi

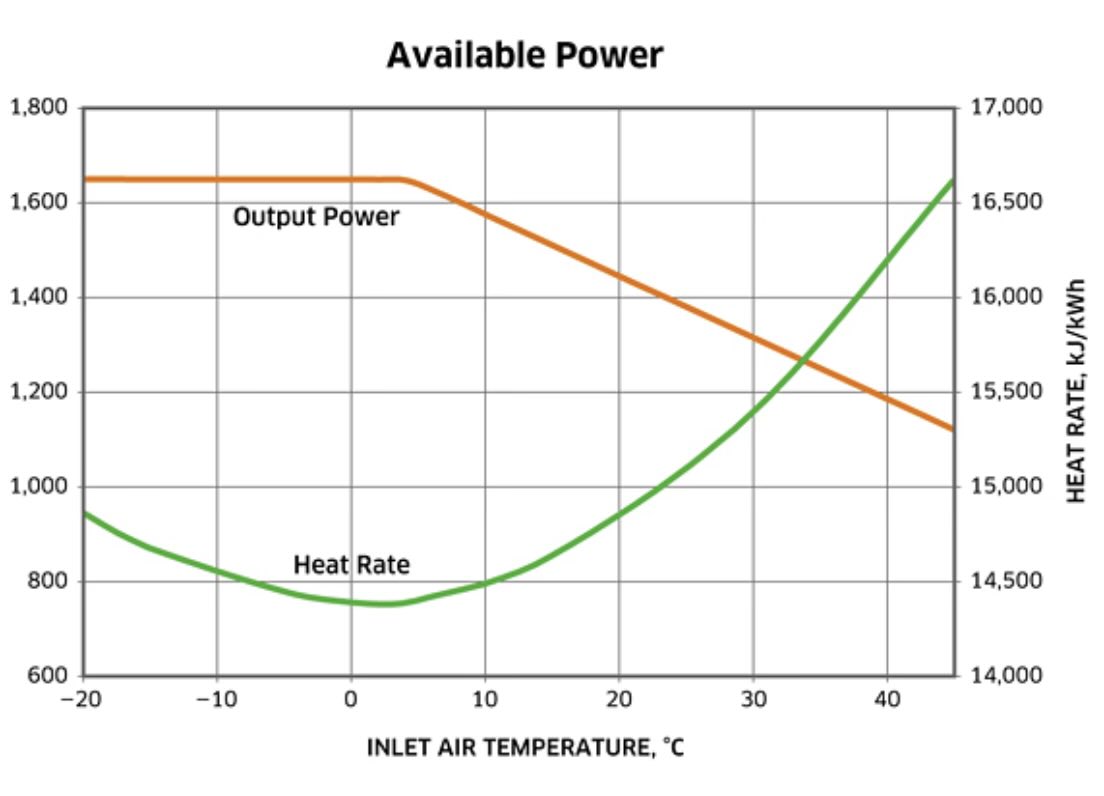
gas turbines are weather dependent electricity sources
English
Dylan Thuras retweetledi

Dylan Thuras retweetledi

I can’t believe, even today, how under the radar geothermal is. The amount of disruption coming to the energy sector is going to catch a lot of people by surprise.
English
Dylan Thuras retweetledi


Dylan Thuras retweetledi

I've been training an openclaw to be a sci-fi writer. Every day, it writes and read stories, we discuss, and it logs its memory and updates a taste profile of what we (or it) likes.
Today, I asked it to write from the POV of an LLM and to surprise me.
It wrote this.
james yu@jamesjyu
English
Dylan Thuras retweetledi

Germany's Merz:
China builds the world’s largest solar farms within a few months.
In the EU, it takes years just for the project to get approved.
Therefore, I propose to implement a fundamental principle in most permitting processes: Any project that is not treated within a few weeks or months will be regarded approved automatically.
English
Dylan Thuras retweetledi
OMG he did it. He really did it! (Turn captions on)
English
Dylan Thuras retweetledi

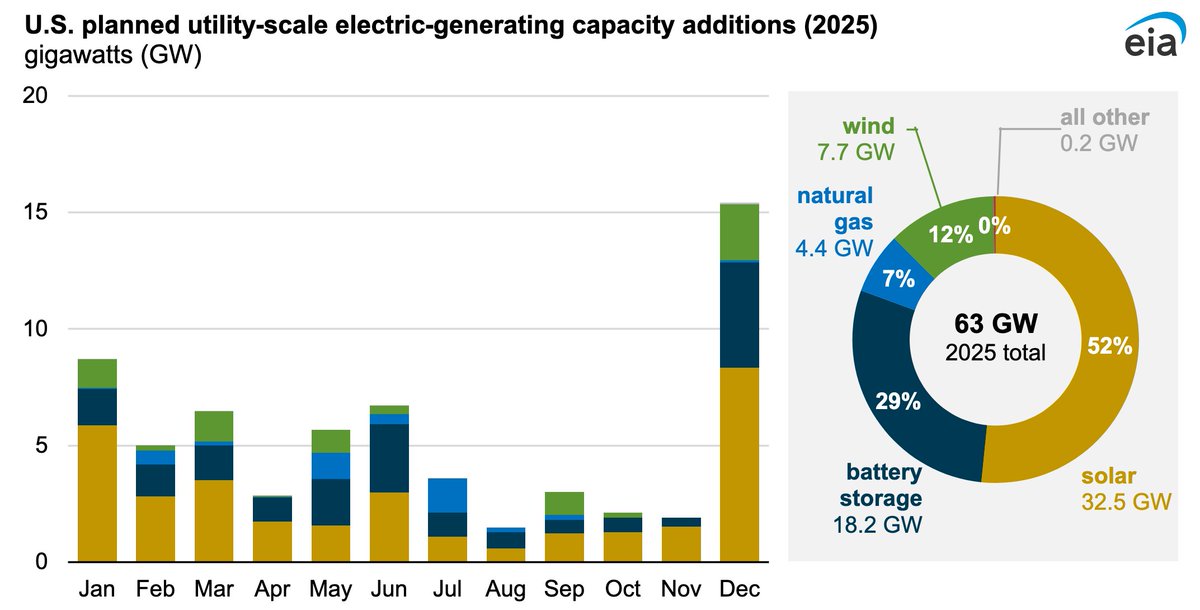
Solar and battery storage combined drove 81% of new U.S. grid capacity in 2025.
32.5 GW solar + 18.2 GW storage = 50.7 GW of zero-fuel infrastructure.
The grid isn't choosing renewables anymore.
It's economically opting to - with Texas leading the way
English
Dylan Thuras retweetledi

In the relatively near future, some general or politician or secret police commander will feed a photo of your face to a computer hooked up to the internet and a distributed drone network and everyone will know you are as good as dead as soon as the jpeg finishes uploading.
Lukas Ziegler@lukas_m_ziegler
End-to-end neural networks racing drones in Abu Dhabi! 🚁 Check out the drone racing team from Delft University of Technology! A completely end-to-end neural network solution, from pixels to direct motor commands. No Kalman filters. No computer vision feature detectors. Just neurons flying the drone. The challenge is extreme. These drones fly at high speeds and need split-second decisions with minimal onboard resources: a single rolling-shutter camera and an IMU. Their approach is called SkyDreamer, based on the Dreamer-v3 reinforcement learning algorithm. First, a world model is trained in simulation. Then, the neural network learns how to fly in its dreams through reinforcement learning. The network's internal state can be read out to see where it thinks it is on the track or how fast it's going. Even better, the drone estimates some of its own body characteristics during flight, like the camera angle relative to the body, eliminating time-consuming manual calibration. The system uses only a single camera and the gyros from the IMU, ignoring the accelerometers, just like human FPV pilots do. ~~ ♻️ Join the weekly robotics newsletter, and never miss any news → ziegler.substack.com
English
Dylan Thuras retweetledi

Dylan Thuras retweetledi

for me the odds that AI is a bubble declined significantly in the last 3 weeks and the odds that we’re actually quite under-built for the necessary levels of inference/usage went significantly up in that period
basically I think AI is going to become the home screen of a ludicrously high percentage of white collar workers in the next two years and parallel agents will be deployed in the battlefield of knowledge work at downright Soviet levels
English
Dylan Thuras retweetledi

i think about this every time a founder tells me they are doubling their team

English