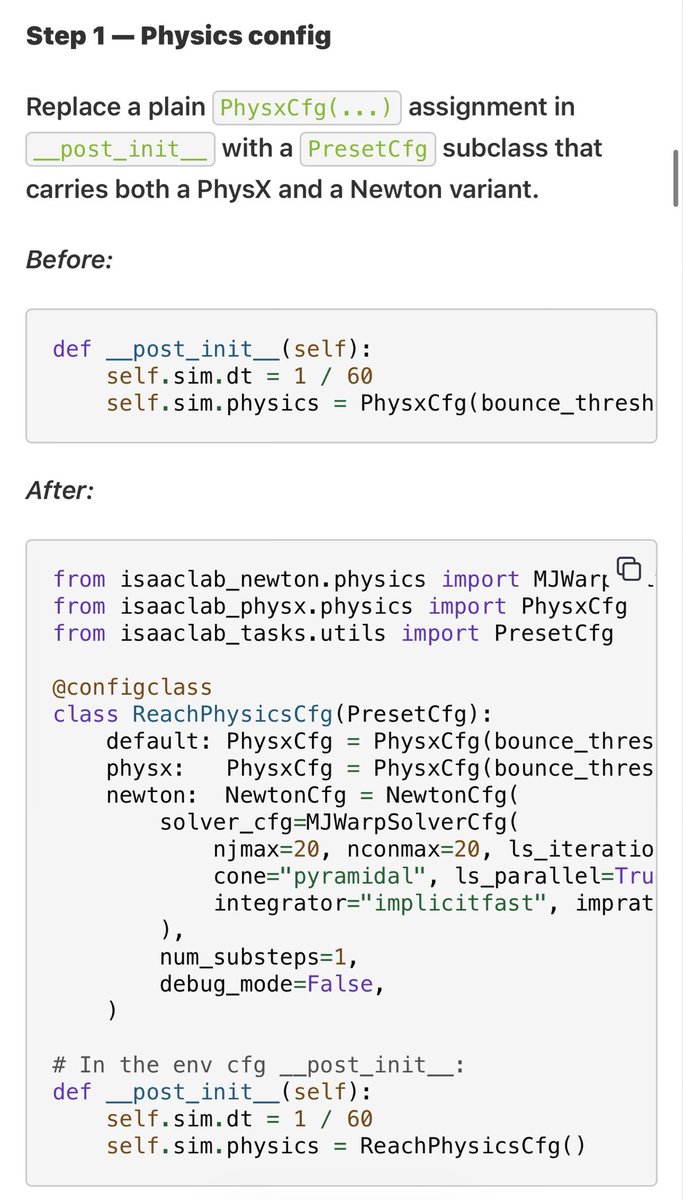
@KyleMorgenstein @LouisLeLay4 @ChongZitaZhang MJWarp definitely has more knobs that can be turned, and I do expect that most projects will want to tune a few of them. The main point though is that we’re providing flexibility here. You can still stick with PhysX only and existing parameters if you want too
English