Sabitlenmiş Tweet

Karol Hausman
1.4K posts
@hausman_k
@Physical_int
I'm extremely excited to announce that we've successfully inferenced π0.5 on our excavator! We've collected a massive corpus of real-world data with natural language labels from operators in the industry and are using it to create some really cool policies. Here's our first demo of it successfully completing a task with just 200 trajectories. More on the way :) Read our blog post: labs.actor/research/vla-e… @physical_int
We’ve developed a memory system for our models that provides both short-term visual memory and long-term semantic memory. Our approach allows us to train robots to perform long and complex tasks, like cleaning up a kitchen or preparing a grilled cheese sandwich from scratch 👇
General-purpose AI models are behind some of the most exciting applications we now can't live without. We envision that an analogous “physical intelligence layer” built with models like π0.6 will similarly spur a new wave of applications for the physical world. We’ve recently begun working with a handful of companies that have deployed their robots to do real-world, useful things. pi.website/blog/partner/?…
We are pleased to announce the close of Thrive X. Exceeding $10 billion, Thrive X comprises $1 billion designated for early-stage investments and $9 billion designated for growth-stage investments. We do not view this as a milestone, but as a commitment to the long work ahead. We view Thrive as a company. Our product is partnership - the willingness to commit deeply to a small number of founders, and to stand with them through momentum and adversity. This is the discipline we bring to our work, and the responsibility we accept when founders partner with Thrive. We do not hedge. Concentration demands loyalty to the founders and missions we back. In this moment, exposure alone is not a strategy. Judgment without commitment is not enough. Advantage will accrue to those who choose deliberately, commit deeply, and endure through difficult moments. Thrive was founded to be an enabling technology for the world we want to see. We are deeply aware that we are not the main character. The founders that we are fortunate enough to partner with are the artists. Our role is to help create the conditions where great work can come to life. We take a long view grounded in the belief that category-defining companies tend to create structural compounding advantages over long arcs. This fund reflects the continuity of our approach and the ways our work has deepened alongside the founders we support. We are grateful for the trust our Limited Partners place in us, and for the opportunity to work alongside those who are building with purpose, integrity, and courage. thrivecap.com/thrive-x
This week on Training Data: robots! I really admire @Physical_int for their open publishing spirit. @hausman_k and @jtspringenberg joined me and @Alfred_Lin to chat about pi*0.6, learning from experience, long-horizon robot performance, and more.
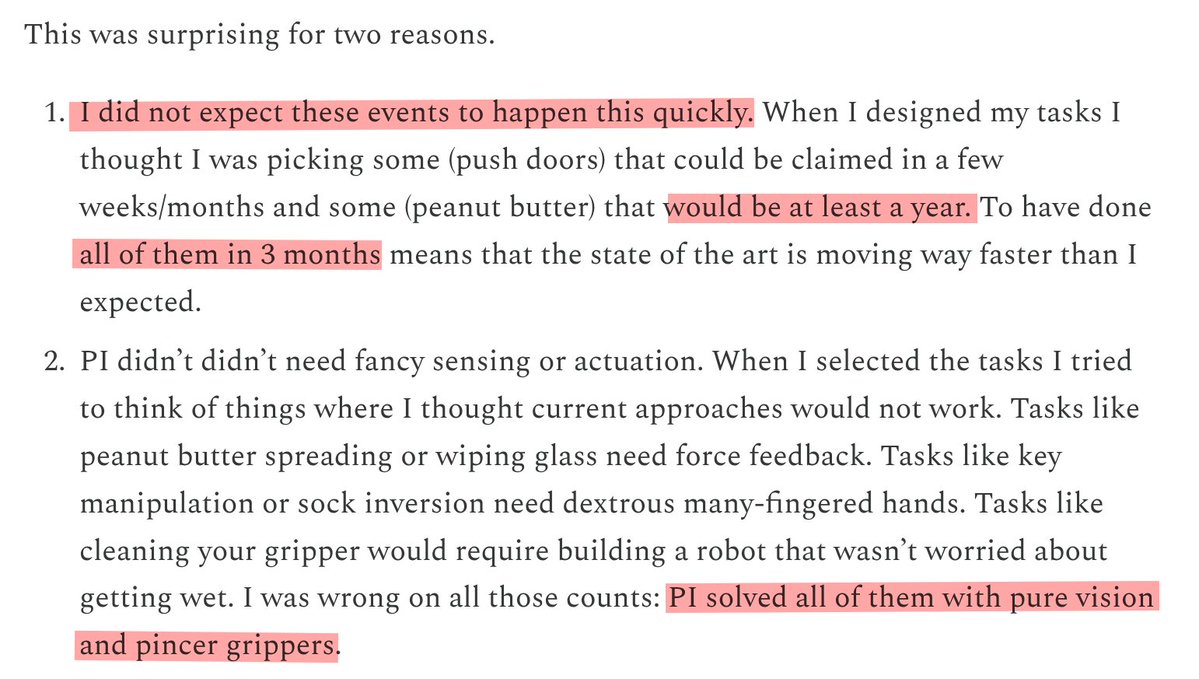
We got our robots to wash pans, clean windows, make peanut butter sandwiches, and more! Fine-tuning our latest model enables all of these tasks, and this has interesting implications for robotics, Moravec's paradox, and the future of large models in embodied AI. More below!
We discovered an emergent property of VLAs like π0/π0.5/π0.6: as we scale up pre-training, the model learns to align human videos and robot data! This gives us a simple way to leverage human videos. Once π0.5 knows how to control robots, it can naturally learn from human video.

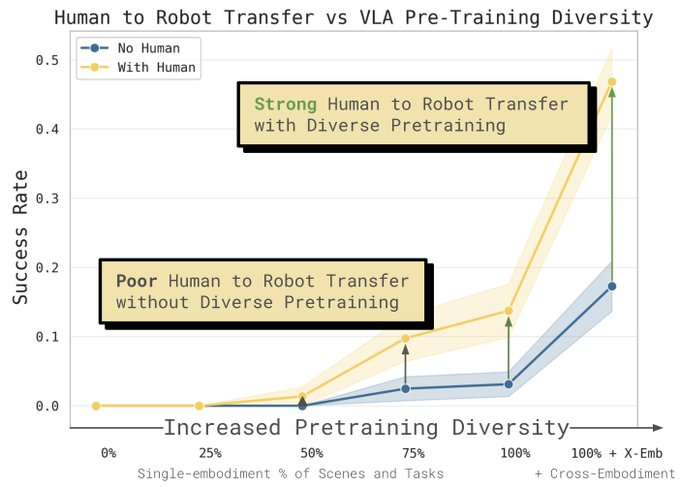
We discovered an emergent property of VLAs like π0/π0.5/π0.6: as we scale up pre-training, the model learns to align human videos and robot data! This gives us a simple way to leverage human videos. Once π0.5 knows how to control robots, it can naturally learn from human video.

We've added pi-05 to the openpi repo: pi05-base, pi05-droid, pi05-libero. Also added PyTorch training code!🔥 Instructions and code here: github.com/Physical-Intel… This is an updated version of the model we showed cleaning kitchens and bedrooms in April: pi.website/blog/pi05
π0.5 is a step improvement over π0. I just watch our robot fold 25 napkins in a row in 44 mins, including disentangling multiple napkins accidentally pulled into the workspace. Knowledge insulation ftw. Congrats @physical_int and thank you for open sourcing your work.