
Hyperspawn Robotics
38 posts

Hyperspawn Robotics
@hyperspawn
open platform for humanoid robots for all
Katılım Haziran 2021
73 Takip Edilen658 Takipçiler


I want to fund as much hardtech as possible this year.
Who is building the coolest shit?
Bonus for images/videos
English

@Em_Nomadic Check out our platform hyperspawn.org/platform (pc)
English

You can just build them now.
Open source robotics now feels like when people first realized you could just build a website. Suddenly everyone could participate and nobody had any idea what was about to get built.
We’re at the beginning of that same thing but for physical AI.


English

mostly solved the closed loop link issues. got pos, acc, vel, effort controllers for all subassemblies and wrote ros nodes ready for publishing values, here's a basic training sim for walking, using guided low-res params in gazebo. still facing a few issues bringing the model to isaac, still in the works.
English
Hyperspawn Robotics retweetledi
Hyperspawn Robotics retweetledi

Excited to announce GR00T N1, the world’s first open foundation model for humanoid robots! We are on a mission to democratize Physical AI. The power of general robot brain, in the palm of your hand - with only 2B parameters, N1 learns from the most diverse physical action dataset ever compiled and punches above its weight:
- Real humanoid teleoperation data.
- Large-scale simulation data: we are open-sourcing 300K+ trajectories!
- Neural trajectories: we apply SOTA video generation models to “hallucinate” new synthetic data that features accurate physics in pixels. Using Jensen’s words, “systematically infinite data”!
- Latent actions: we develop novel algorithms to extract action tokens from in-the-wild human videos and neural generated videos.
GR00T N1 is a single end-to-end neural net, from photons to actions:
- Vision-Language Model (System 2) that interprets the physical world through vision and language instructions, enabling robots to reason about their environment and instructions, and plan the right actions.
- Diffusion Transformer (System 1) that “renders” smooth and precise motor actions at 120 Hz, executing the latent plan made by System 2.
We deploy N1 on GR1 robot, 1X Neo robot, and a large collection of simulation benchmarks. N1 achieves up to +30% boost in diverse manipulation tasks for household and industrial settings.
While humanoid robots are the main focus of N1, our model also supports cross-embodiment. We finetune it to work on the $110 HuggingFace LeRobot SO100 robot arm! Open robot brain runs on open hardware. Sounds just right.
Let’s solve robotics, together, one token at a time.
Links to our Whitepaper, Github repo, HuggingFace model, and open dataset page in the thread: 🧵
English

The fact that the timeline recommended this to me is honestly insane. 0 network. 299 followers. Just the content
The recsys guys at this company are built different and honestly there are so few of them. We are hiring! You should apply, there aren't many opportunities like this

Hyperspawn Robotics@hyperspawn
These powerful babies will enable the walk🚶♂️
English

Looking forward and around to the new era.
@POINTBLANK_LLC at it again 🔥
Join t.me/fractionalrobo…, don't miss out!
English
Hyperspawn Robotics retweetledi

Everything you love about generative models — now powered by real physics!
Announcing the Genesis project — after a 24-month large-scale research collaboration involving over 20 research labs — a generative physics engine able to generate 4D dynamical worlds powered by a physics simulation platform designed for general-purpose robotics and physical AI applications.
Genesis's physics engine is developed in pure Python, while being 10-80x faster than existing GPU-accelerated stacks like Isaac Gym and MJX. It delivers a simulation speed ~430,000 faster than in real-time, and takes only 26 seconds to train a robotic locomotion policy transferrable to the real world on a single RTX4090 (see tutorial: genesis-world.readthedocs.io/en/latest/user…).
The Genesis physics engine and simulation platform is fully open source at github.com/Genesis-Embodi…. We'll gradually roll out access to our generative framework in the near future.
Genesis implements a unified simulation framework all from scratch, integrating a wide spectrum of state-of-the-art physics solvers, allowing simulation of the whole physical world in a virtual realm with the highest realism.
We aim to build a universal data engine that leverages an upper-level generative framework to autonomously create physical worlds, together with various modes of data, including environments, camera motions, robotic task proposals, reward functions, robot policies, character motions, fully interactive 3D scenes, open-world articulated assets, and more, aiming towards fully automated data generation for robotics, physical AI and other applications.
Open Source Code: github.com/Genesis-Embodi…
Project webpage: genesis-embodied-ai.github.io
Documentation: genesis-world.readthedocs.io
1/n
English

Hyperspawn Robotics retweetledi

Assembly time: Prototype leg with capstan actuators.


English
Hyperspawn Robotics retweetledi

CAD Assembly to URDF.
Simulation is carried out parallelly in Altair (CAD model) & ROS2 (using URDF)
Altair: Structural analysis for fatigue, stress, etc. with high fidelity motionsolve model.
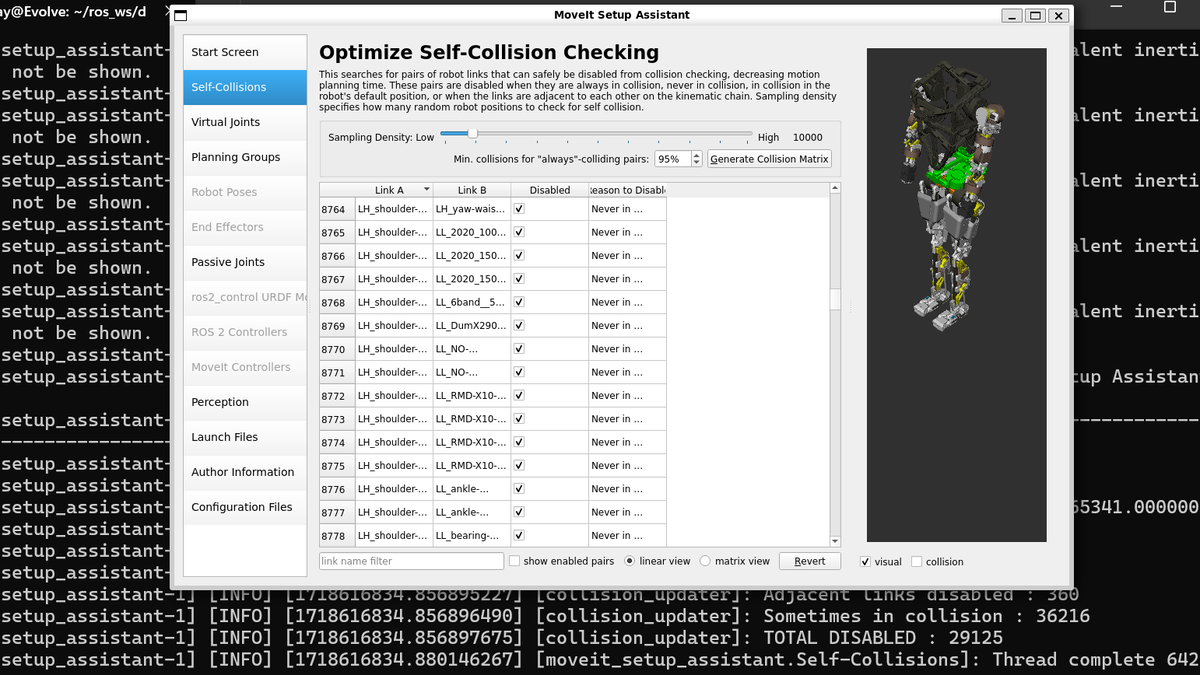
Using URDF: Motion planning in ROS2 & MoveIt, and reinforcement learning in Isaac sim.
English
Hyperspawn Robotics retweetledi

Things are picking up, we had a great team meeting today!
Team hackathon push tomorrow:
- Extensive Testing of Roko Ultra LLM dash
- Testing updated Roko Info site
@POINTBLANK_LLC making some amazing strides, improving on an open-source URDF
Prepping for Consensus EOM.
English

@anthrobotics @POINTBLANK_LLC We have the new linear actuators!! Way to go
English

Ready to test out a new ballscrew-driven linear actuator designed by @POINTBLANK_LLC! #Robotics #3DPrinting

English