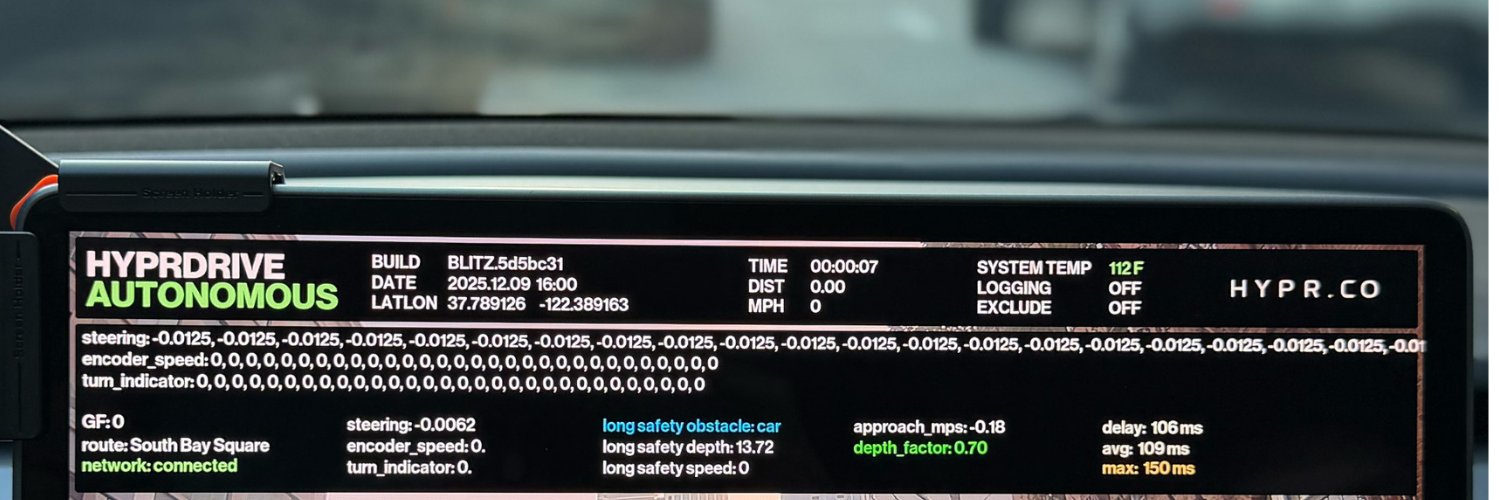

HYPRDRIVE™ and Run-Time Learning.
Our CEO @TimKentleyKlay explains on @RoadToAutonomy how we use Guidance Feedback to power our continuous learning framework.
x.com/RoadToAutonomy…
#AutonomousDriving #VisionOnly #MachineLearning
The Road to Autonomy®@RoadToAutonomy
Self-Driving on 33 Watts: Live Demo with @TimKentleyKlay of @HYPR.
English




