Sabitlenmiş Tweet

What's the right architecture for a VLA?
VLM + custom action heads (π₀)?
VLM with special discrete action tokens (OpenVLA)?
Custom design on top of the VLM (OpenVLA-OFT)?
Or... VLM with ZERO modifications? Just predict action as text.
The results will surprise you.
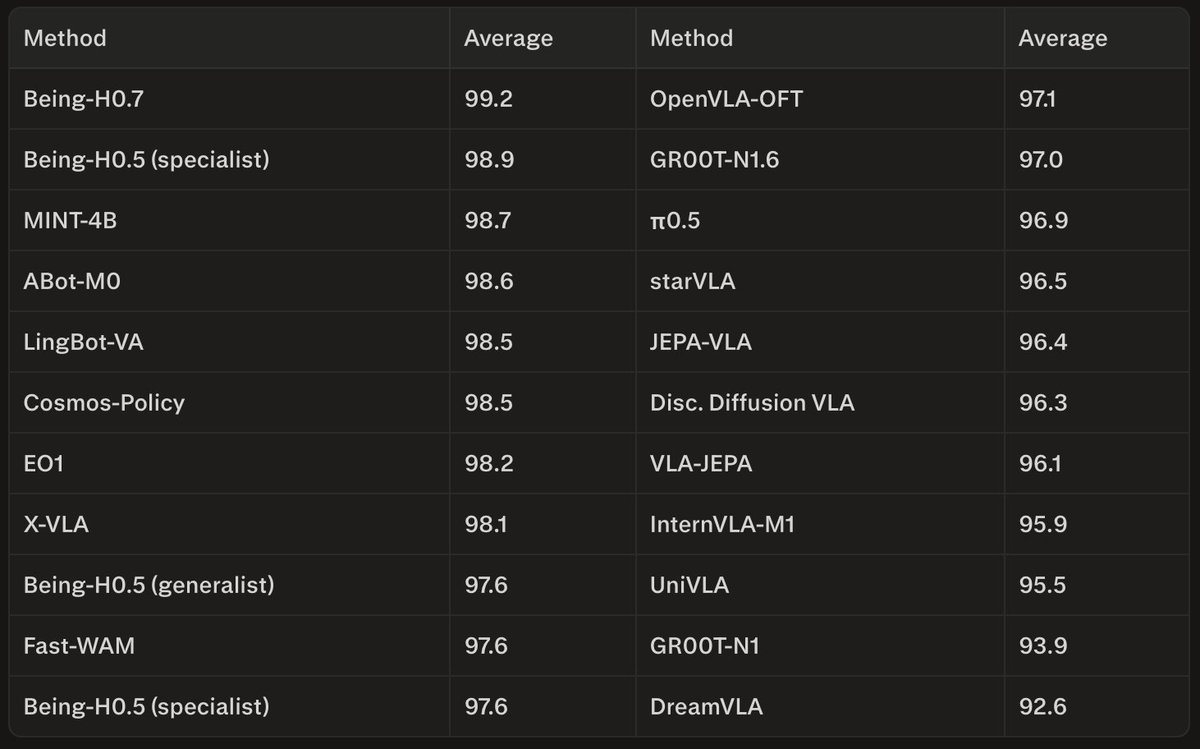
VLA-0: Outperforms π₀, GR00T-N1, MolmoAct, SmolVLA.
With ZERO changes to the VLM.
🧵⬇️
English