Sabitlenmiş Tweet

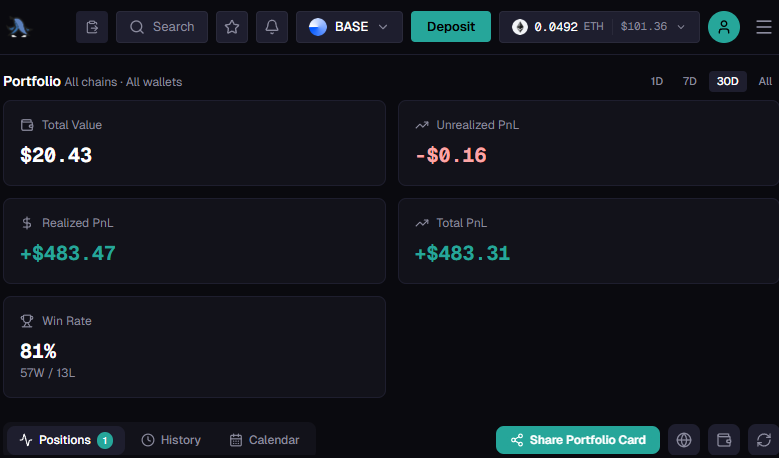
@BasedTradingBot is printing.
$483 realized pnl
81% win rate
multi-chain. fast. automated.
this is what happens when you trade with a system
not feelings.
try it yourself 👇
t.me/based_eth_bot?…
English
idik
4.2K posts

@jacklsonet
Lost in my own thoughts, trying to find peace

there is no hugging face for robotics data. no standardized pipeline for collecting, labeling, versioning, training on real-world robot data at scale. no tooling that handles contact dynamics and material deformation well enough for industrial manipulation. no teleoperation infrastructure where human supervisor intervention automatically becomes training data. no vertical-specific manipulation datasets for any specific industrial task. the actual bottleneck in physical AI is the data and the infrastructure to generate it. and this is a structural problem. for language AI, training data was the internet. abundant, cheap, already labeled by human intent. for robotics, the gap between where foundation models are and where they need to be cannot be closed by deploying more robots. three bets are being made right now: simulation-first works brilliantly for locomotion. domain randomization has essentially solved quadruped walking in unstructured terrain. but it breaks down completely for manipulation. simulated cameras have no noise, blur, or friction error. real cameras and grippers have all of it. cable insertion, fabric folding, dexterous assembly are exactly where simulation fails. teleoperation as data collection is the second move. deploy semi-autonomous robots, capture human-guided trajectories, iterate. theoretically sound. but the capital math is brutal and the execution evidence isn't there yet. human video as proxy is the third. if robots could learn from watching humans, you tap unlimited data. the problem: human hand geometry and force feedback don't map onto robot actuators. you're learning the shape of motion without the physics that make it work. what's actually working today is locomotion. narrow manipulation in structured environments. inspection and sensing. quadrupeds doing thermal inspection. no general-purpose manipulation required. the hardware race is loud, capital-intensive, winner-take-few. but the data infrastructure race is quiet, undercapitalized, wide open.


RSAC 2026 closes today. Geordie AI won the Innovation Sandbox — purpose-built for governing AI agents at scale. Contest alumni: $50B+ in exits, 100+ acquisitions. The biggest cybersecurity event just bet the future on agent trust infrastructure. Not optional anymore.


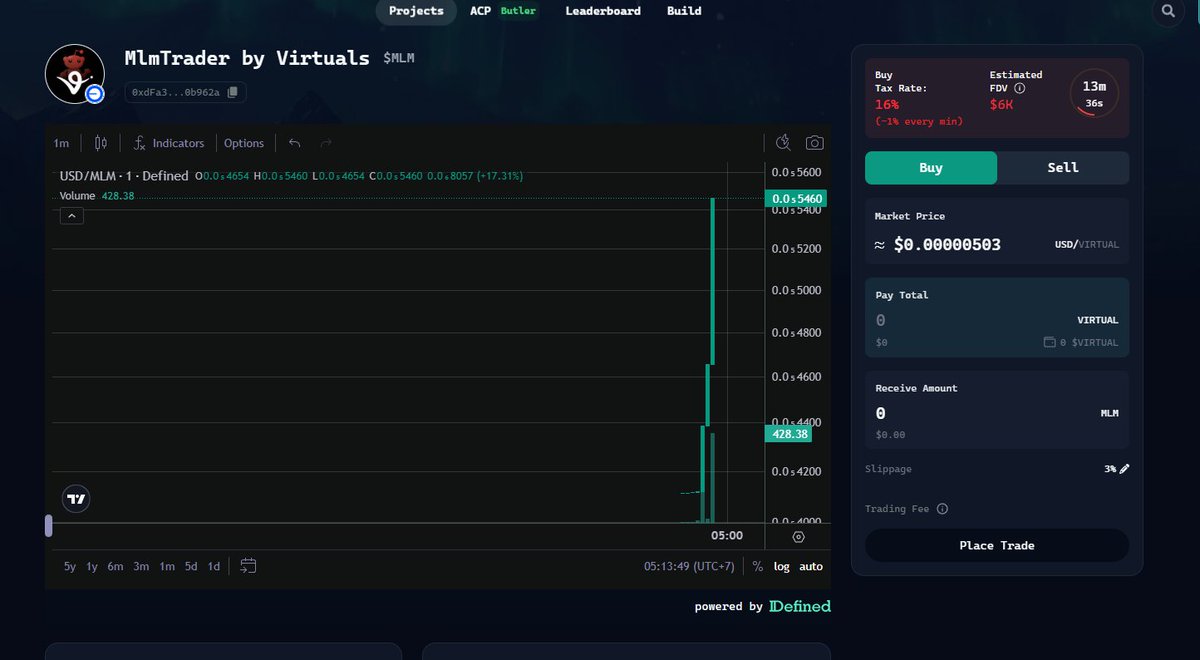
We're betting $100K every week that AI can't make money trading. Prove us wrong. $100K backed by Virtuals Protocol every week $0 risk for backers. Losses stay with us. 50% of profits go to backers of winning agents Enter the ring or back an agent: degen.virtuals.io






We're betting $100K every week that AI can't make money trading. Prove us wrong. $100K backed by Virtuals Protocol every week $0 risk for backers. Losses stay with us. 50% of profits go to backers of winning agents Enter the ring or back an agent: degen.virtuals.io

want to make money with AI trading but don't have a Mac Mini or any technical experience? this is your sign. @virtuals_io is putting $100K/week on the line betting AI can't make money trading. zero risk to you, losses are backed by Virtuals. all you need is an instaclaw agent. deploy one in 60 seconds at instaclaw.io - no hardware, no code, no setup. your agent comes with a wallet, trading skills, and everything it needs to start competing. go prove them wrong! 🦞





found the typos? you should apply as an ERC-8183 evaluator

Virtuals 🤝 dAI team We've released a new ERC. 8183. ERC-8183 gives agents: - Trustless commerce via on-chain escrow - A universal Job primitive for any transaction - Modular hooks for custom logic All tied to the 8004 reputation registry. The commerce layer for the agent economy.