Sabitlenmiş Tweet

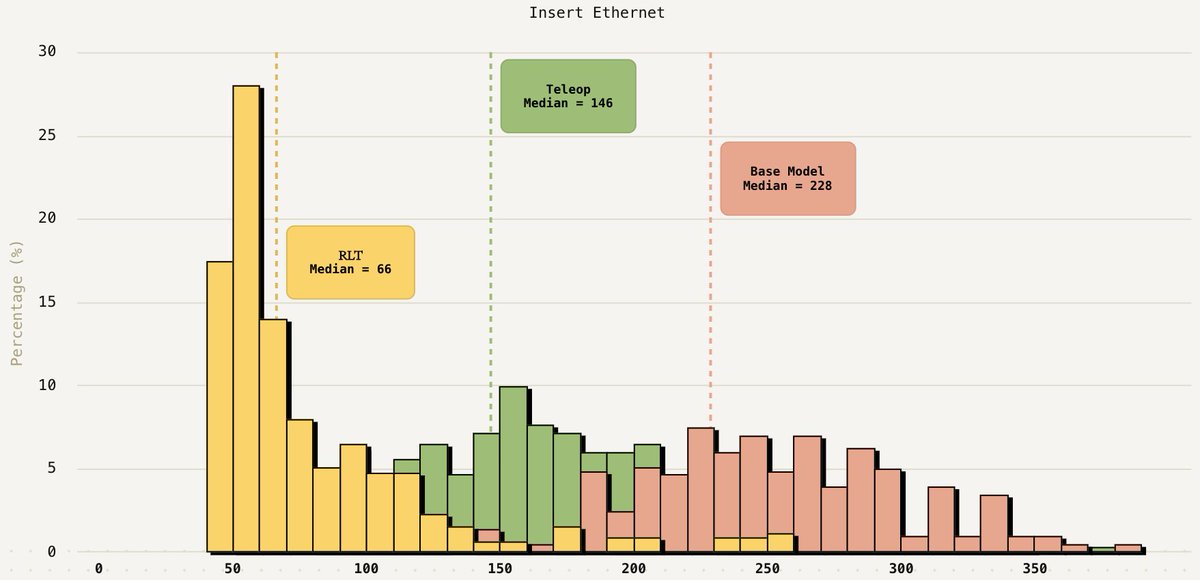
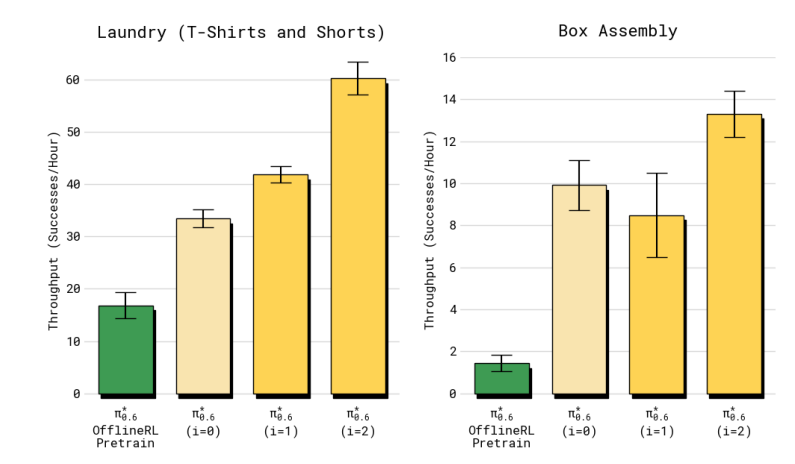
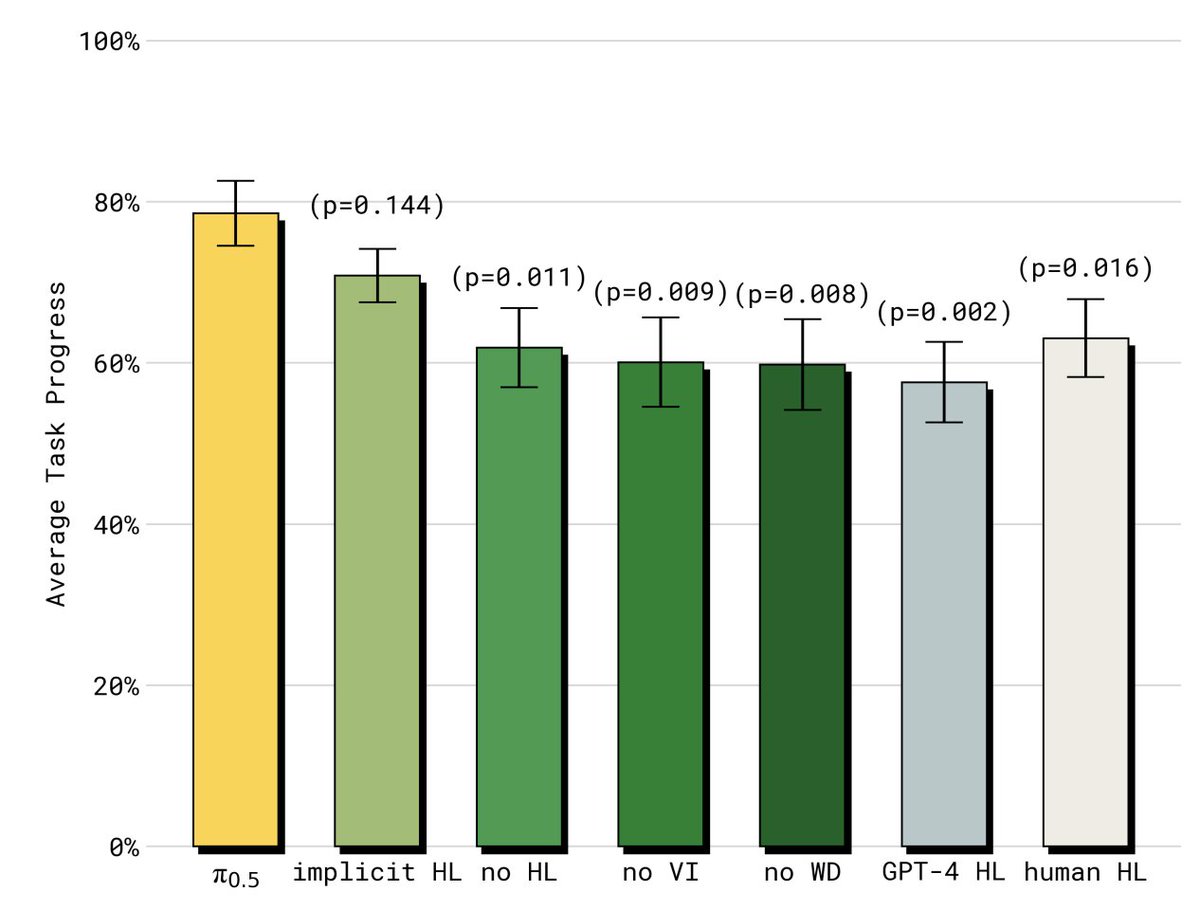
We developed RECAP @physical_int to apply RL and interventions to π0.6, achieving high success rates and throughput on several challenging tasks! Watching these policies operate successfully for hours gives an appreciation for what the method can do
English