
Michael Kaess retweetledi

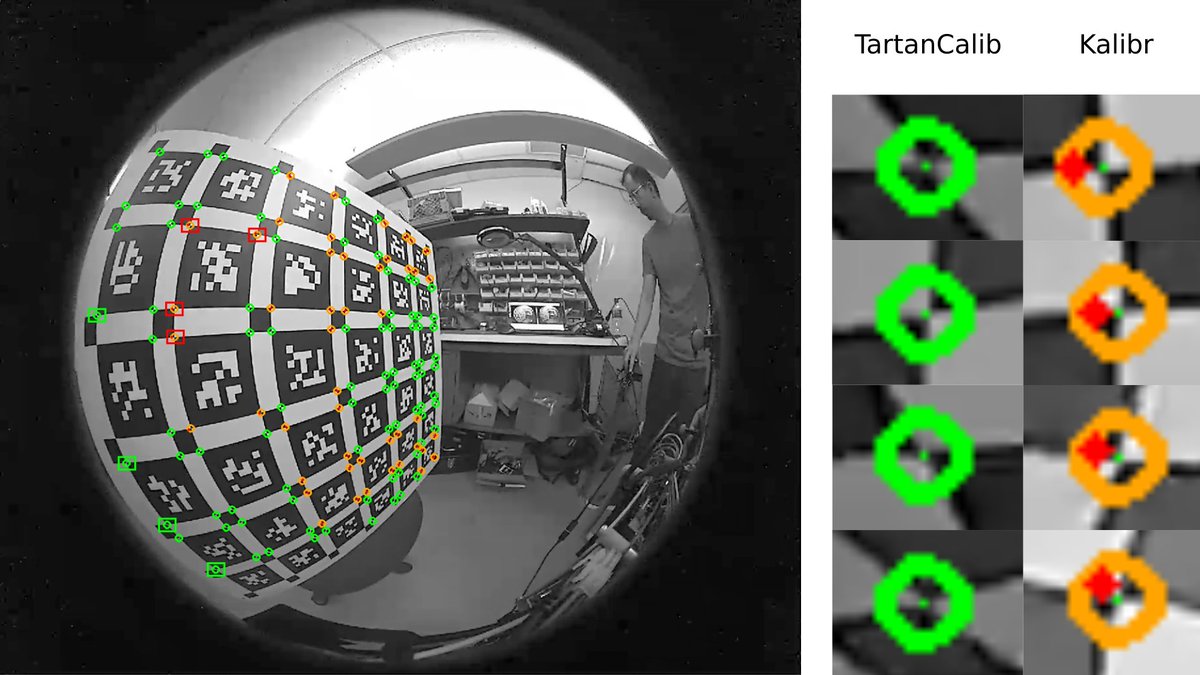
We are excited to announce the release of our open-source calibration package called TartanCalib, which improves reprojection errors by up to 27%, helps us detect up to 42% more features, and improves performance in dense depth mapping: youtu.be/8WCCS-Ag_Co
YouTube
English







