Sabitlenmiş Tweet

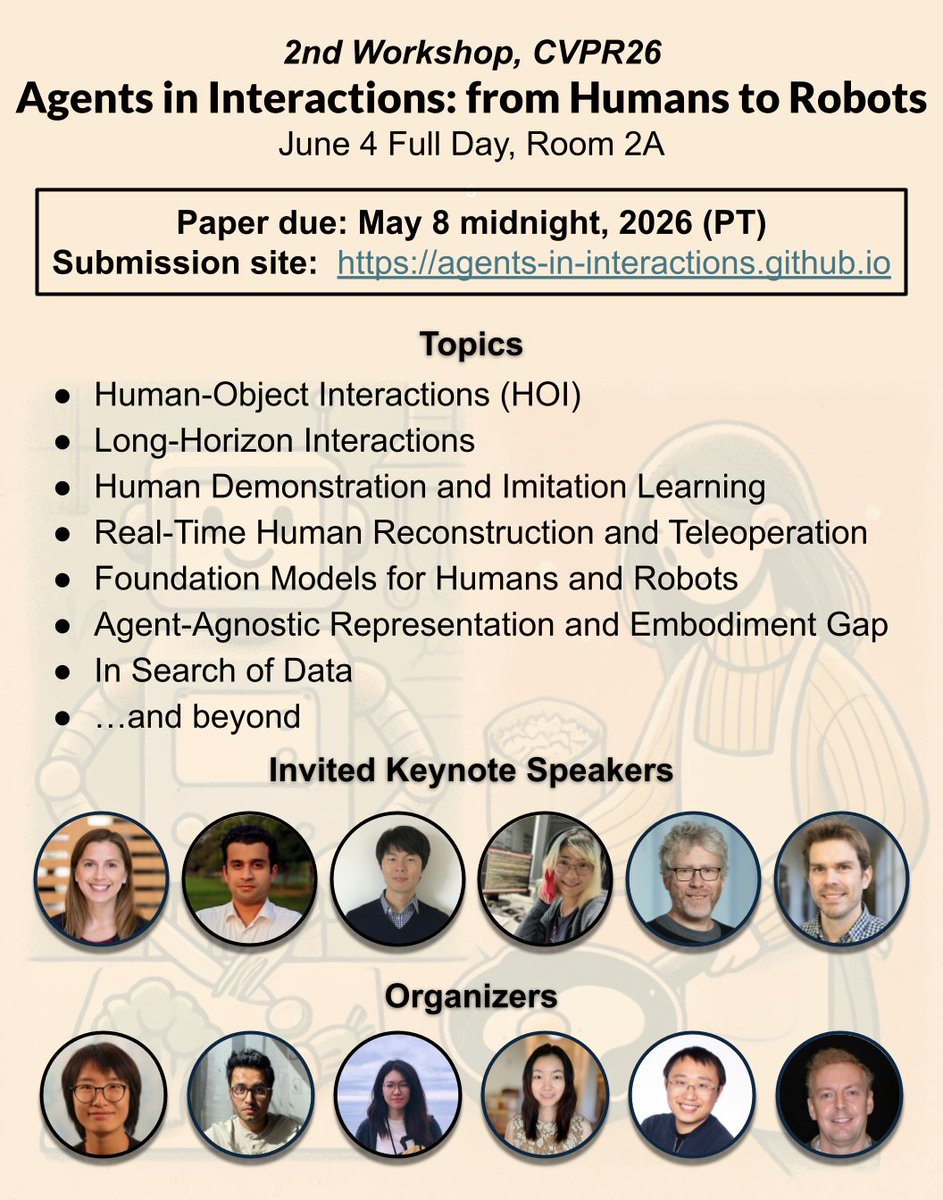
Thrilled to announce I’m joining @JHUCompSci as a CS PhD student with @mangahomanga.
Looking forward to collaborating with new faculty members @_krishna_murthy, @jmin__cho, @anand_bhattad, @HaiminHu & @zihyunchiu and being part of this rising community.
Great things ahead!

English