Ben retweetledi
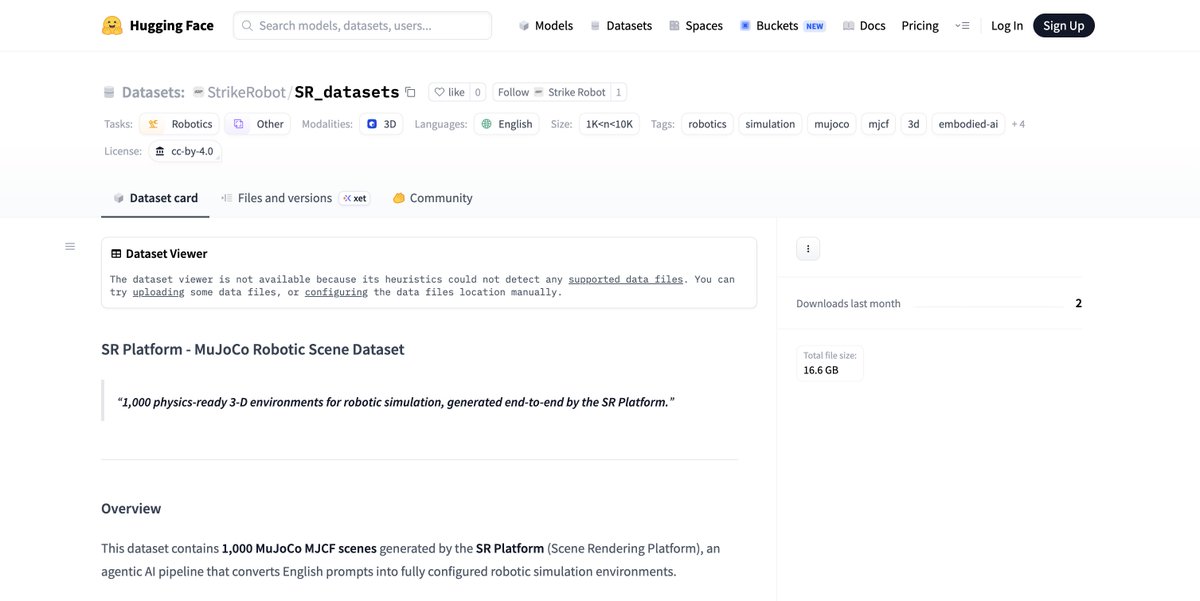
Strike Robot x Venice: Privacy-Focused AI Infrastructure for Robots
@StrikeRobot_ai faced one of the most critical problems when building an AI infrastructure for autonomous robots: which inference engine could run fast, secure, and uncensored? A solution was needed!
As everyone knows, the answer was found with @AskVenice. Venice is a privacy-focused and uncensored AI inference platform. Strike Robot chose this platform as the primary inference backend for SR Agentic and SR Platform. This partnership isn't just a technical integration, my friends; Venice is also providing credit sponsorship and co-developing with Strike Robot – a huge step forward!
What's changing technically?
Inside SR Agentic, Venice now runs as a VLM (Vision-Language Model) reasoning engine. Visual understanding in complex environments, multi-step reasoning, and natural language reporting all pass through Venice. Thanks to the OpenAI-compatible API, integration is clean and fast, and the edge loop remains in place. The two layers don't do each other's work; each performs its own task. This partnership is particularly critical for $SR. Venice's privacy infrastructure + Strike Robot's autonomous systems coming together is not just a technical integration, but redefines how robotic AI is trained.

English