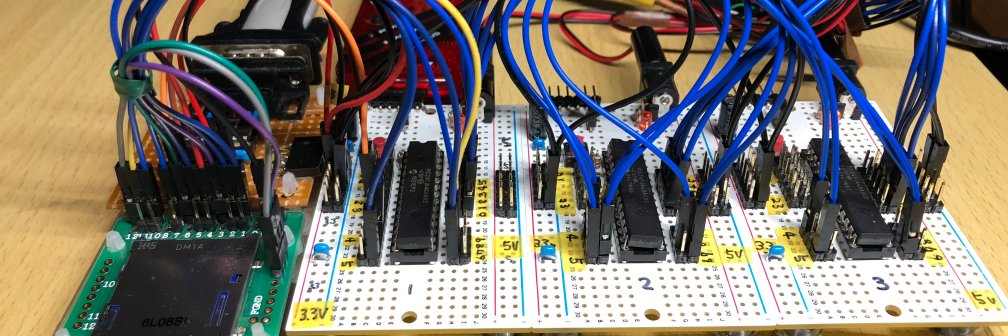
Sabitlenmiş Tweetばんそうこう@vansoukou·2 MayJump! 8個のサーボを同時に等加速度で最大速度へ。 youtu.be/s-91gX4KQks #pic24robotÇevirYouTube 日本語689577017
ばんそうこう@vansoukou·1d「構造とテンション」 180ms毎の時刻をSTEP とし 着地とその前後に3、合計7STEPを定常区間とし 定常区間の前後に調整区間を2STEP取ると 1歩=9STEPで、開始、巡行、停止の3つのモードを、1つの定常区間と、3つの調整区間で記述することができる (ガタ対策で足首に1.5Nのテンション)Çevir 日本語15361.1K4
Embedr@embedrapp·27 Nis@vansoukou watching G01 fall over gave me flashback to every walking project i've ever touched. G03 is smooth as butter though.Çevir English10250
ばんそうこう@vansoukou·26 Nis「ツールは自作だが役に立つ」 2歩目は上体に勢いがつくので A42G01は前方に大きく倒れる ツールで上体角T0を調整したが A42G02は上体が後ろに残る。 さらにT0を調整して A42G03で安定Çevir 日本語3131005.5K17
Marcos Mimenza@worldevolution·27 Nis@vansoukou El paso debe ser más corto, menos alto, y la rodilla no debe estar recta al hacer contacto con el piso. Si corriges eso va a poder caminar mejor.Çevir Español10140
手品のお兄さん@ハンドメイド作家のDX担当@furimabuppan·27 Nis@vansoukou ハンドメイド作家なら知ってる「試作」の壁 でもその前に「調整万能性」 使う神経回路は、動くたびに最適化されるから 試作は縫い目だけじゃなく神経の縫い合わせだったりするÇevir 日本語10145
ばんそうこう@vansoukou·19 Nis「足首角L2と上体角T0のバランス」 ヒトは ・支持脚足首角L2と ・上体角T0で ZMPを制御して歩くと思われる。 c18F01A37G3は、T0やや後、L2やや小で調整 安定しているが、上体振れ大。 c18F01A40G4は、T0やや前、L2やや大で調整 上体振れ小だが、やや不安定。Çevir 日本語2261456K28
ばんそうこう@vansoukou·12 Nis( 逆アニメ解析 (ω制限対応 (A37))) 逆アニメ解析(動画を静止撮像に分解し計算像と重ねる手法)で、A36を見ると、角速度超過で、計算像に撮像が追いついていない部分がある。補正後A37と、補正前A36Çevir 日本語06451.5K2
ばんそうこう@vansoukou·5 Nis「IMU像と撮像は近い」 2歩目の重心が後ろすぎると後に倒れ、 前すぎると前につまづく。 支持脚足首角を、 +0, +3, +6, +9, +12度と振って IMU像と、撮像から、+6度を採用した c16F01A36Gの動画Çevir 日本語06361.4K2
ばんそうこう@vansoukou·29 Mar((( こんな ところに Lisp ))) mp4から切出した大量のpngを クロップ、スケール、GIF変換。 とても人力ではできないので、 GIMPでスクリプトでバッチ処理。 支持脚の足首トルクが 撮像(赤)と算像(青)の差から見える。Çevir 日本語03227491
ばんそうこう@vansoukou·22 Mar「時間解像度」 この歩行機は 1ptch=23ms、1step=8ptch=184msとして、 1step毎に目標角データを持ち 1ptch毎に3次補完をしている。 stepカウンタに、ptchカウンタを追加して 撮像 c18F01A31S (赤)と 算像 c18F01A31G (青)を ptch毎に比較。Çevir 日本語06277002
Tom Moore@mooreth42·16 Mar@vansoukou That's awesome! Do you think it is possible to build a LEGO robot that could assemble a copy of itself?Çevir English1081281
ばんそうこう@vansoukou·15 Mar「歩行観測」 撮像と計算像を重ねることができたので 視点を歩行面まで下げて、 カメラを望遠にして 観測した結果c18F01A31S(赤)と 計算像c18F01A31G(青)との差分を記録する。Çevir 日本語19993.6K17
minchi (Yasunari Mimura)@minchi3333·9 Mar@vansoukou 😍 バレーボールのスパイクジャンプ動作(水平に助走して上方に高く跳ぶ動作)を研究してまして... 人間の身体中をセンサで測定する技術が存在しなくて... 本気でやると人体実験😅 ロボットの実演に期待😁 西田選手: youtu.be/126bYhFqA3U?si… 一応,私の学会発表ネタ: youtu.be/U-8_b28_A6o?si…ÇevirYouTubeYouTube 日本語10147
minchi (Yasunari Mimura)@minchi3333·8 Mar弾性反発を活用して,「リバウンドジャンプの連続」に移行できれば,「走行」が実現できそう?🤔Çevirばんそうこう@vansoukou「弾性歩行」 動画をGIFで切り出して シミュレータに同期させ Xlibで背景に貼ると 関節にかかるモーメントが 指示角度と実角度のズレとして見える。 実機に合わせて表示角を修正した c18F01A30G_04 日本語1021801
ばんそうこう@vansoukou·8 Mar「弾性歩行」 動画をGIFで切り出して シミュレータに同期させ Xlibで背景に貼ると 関節にかかるモーメントが 指示角度と実角度のズレとして見える。 実機に合わせて表示角を修正した c18F01A30G_04Çevir 日本語04461.4K5
ばんそうこう@vansoukou·23 Şub「加速度の窓」 前回のc18F01A24G_04は 停止時の振れが大。 重心角(s.z)に、加速度(a.x)の窓を追加して 各関節角(R0-4, L0-4)を細かく振って、 s.zとa.xの収束が早いものを実測で求めた c18F01A30G_02Çevir 日本語07521.5K6
ばんそうこう@vansoukou·15 Şub「2歩目の姿勢」 前回のc18R01A19G_01は 姿勢ベクトルをφとすると 1歩目φR=R0+R1+R2+R3-R補正 2歩目φL=L0+L1+L2+L3-L補正 2歩目の慣性が大、剛性が小なので φLが小さく支持脚切替時に加速段差。 足首角L3でφLを増やし段差を軽減した c18R01A24G_05Çevir 日本語27883.3K8