@jxmnop Can confirm. Did some kernel work today and heard from Zuck within the hour. Had to go to the gym though. Told him to come back later.
English
Mike Larkin
3.2K posts

@mlarkin2012
Low-level developer. Peakbagger. Private Pilot. Founder/CTO Ringcube (acquired by Citrix) and Deepfactor (acquired by Cisco). Building hypervisors and OSes.



Strap in for a long one! The 6-part story of #OpenBSD/sgi as told by Miod Vallat! miod.online.fr/software/openb… Single-page version: miod.online.fr/software/openb…






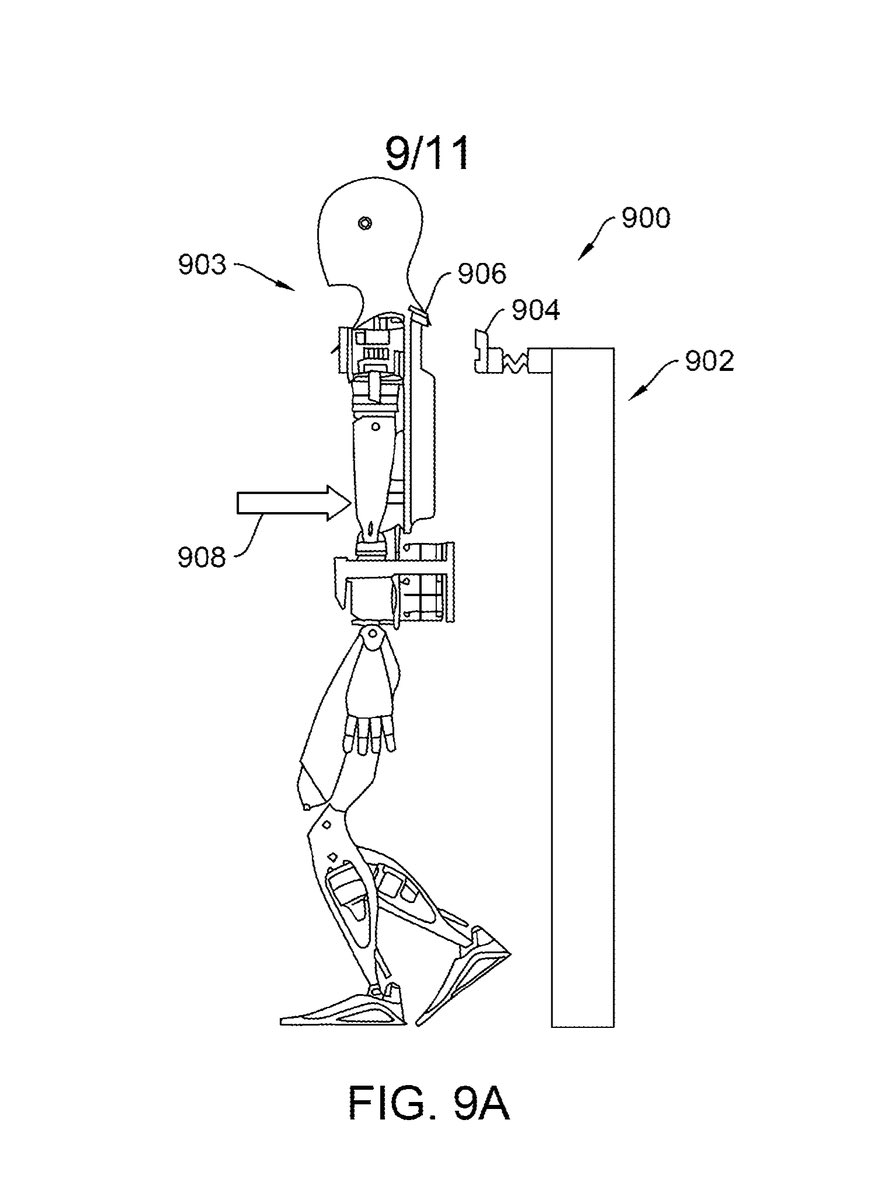

🚨 @TESLA FILED A PATENT FOR A CHARGING STATION THAT HOLDS OPTIMUS UPRIGHT WHILE ITS MOTORS ARE OFF In July 2025, Sawyer Merritt posted on X that Tesla's Optimus robot "autonomously locates the nearest charging station, self-navigates to it, only uses its rear cameras to align itself and then backs into the charger to plug itself in." The clip confirmed what the robotics community had been speculating: Tesla's humanoid robot can find its way to a charger and connect without human help. What the clip did not show is what happens next. Once docked, can the robot turn off its motors? A wheeled robot can. It just sits there. A humanoid cannot. Cut power to the joints and the robot collapses under its own weight. A PCT patent published today, March 12, 2026, describes how Tesla solves this. The priority date is September 3, 2024, six days before the Cybercab wireless charging patent that published on the same day. WO2026055103A1, "Robotic Charging System, Robotic System and Charging Station for Statically Stable Charging of the Robotic System," details a charging station with an angled structural tab that slides into a receptacle on the robot's back. In the docked position, the tab supports the robot's weight in a cantilevered orientation. Motors off. Robot standing. Charging, software updates, and sensor calibration all proceed simultaneously. ⚠️ The Problem Humanoid robots are not statically stable. Unlike wheeled or tracked platforms that stay put when powered off, a bipedal robot needs its actuators running continuously just to stand [0004]. Every joint in the legs, hips, and torso must hold position against gravity. Turn off the motors and the joints go limp. The robot falls. This creates a direct conflict with charging. Keeping the actuators active during a charging session means a portion of the incoming power is diverted to balancing, not to the battery [0047]. Charging slows down, and the motors accumulate unnecessary wear. The problem gets worse when the robot needs software updates or calibration, which may require the motors to be fully disengaged [0005]. Conventional charging docks, designed for statically stable robots like Roombas or warehouse AGVs, assume the robot can hold its own position. For a humanoid, that assumption fails. Boston Dynamics has shown Atlas swapping its own battery pack. Other companies use seated or lying-down charging poses. None of these approaches allow a humanoid to charge while standing with its motors off. The patent describes the core problem: "When power to the actuators is removed, the joints can become limp and unstable, causing the humanoid robot to collapse under its own weight" [0004]. 🔩 Core Innovation 1: The tab that holds 300 lbs upright The charging station includes a base, mounted to a wall or floor, and a structural tab that extends upward at an angle between 25 and 65 degrees [0008]. The default angle is about 45 degrees [0072]. The tab has a steel or aluminum core for load bearing (rated for 100 to 300 lbs), wrapped in a polymer overmold for wear resistance and electrical insulation [0058]. The robot has a receptacle on its upper back, positioned between the shoulder structures [0049]. During docking, the receptacle slides down over the structural tab. Once seated, the tab supports the robot's weight in a cantilevered orientation, meaning the robot leans into the station and gravity locks it in place [0064]. The angled geometry prevents the robot from slipping off unintentionally while still allowing controlled undocking [0056]. With the structural tab bearing the load, the robot can shut down some or all of its actuators [0048]. This eliminates idle power consumption during charging. The battery receives the full charging current instead of sharing it with balance control. Motor wear drops. And the robot stays upright. Electrical contacts are built into the tab and receptacle surfaces. Power contacts carry charging current. Communication contacts handle data: Ethernet, CAN bus, RS-485, or USB [0083]. The two contact types are staggered along the tab so that power connects first during docking and communication disconnects first during undocking, preventing arcing and data corruption [0069]. 🦿 Core Innovation 2: Walk backward, squat to dock The docking sequence has two phases. First, the robot executes a backward walking motion toward the charging station [0101]. The rear-facing camera detects high-contrast fiducial markers on the station's surface to guide the approach trajectory [0014], [0101]. As the robot backs in, alignment arms on the station provide coarse lateral guidance, compensating for approach errors of 5 to 100 mm [0055]. The arms funnel the robot toward the structural tab. Second, the robot performs a squatting motion [0102]. This lowers the receptacle onto the structural tab. The tab's tapered leading edge guides fine alignment during this vertical descent [0057]. The squatting distance is 10 to 40 mm [0096]. The combination of horizontal approach and vertical lowering produces a two-axis docking path that locks mechanically and electrically in a single motion [0097]. Once load sensors in the robot's legs confirm that a sufficient proportion of weight has transferred to the station, the system verifies docking is complete [0103]. The patent describes this as "a backward walking motion toward the charging station... followed by a squatting motion of the robotic system" [0101], [0102]. 🛠️ Core Innovation 3: Three jobs in one dock Most robotic charging systems do one thing: charge the battery. This patent turns the docking session into a multi-function maintenance window. While the robot is mechanically stabilized on the structural tab, the rear-facing camera images the fiducial markers on the station's surface [0088]. Because the station's geometry is known, the system can recalibrate the kinematic chain between the camera and the robot's joints. This corrects for positional drift, lens distortion, or joint misalignment that accumulated during operation [0088]. The calibration routine runs while the robot maintains partial weight on the structural tab. The actuators can execute controlled motions for recalibration while the tab keeps the robot stable [0087]. Calibration results, diagnostic error codes, and system logs upload through the communication contacts to the station for review or remote transfer [0090]. Software updates and firmware patches also flow through the same contacts [0086]. The robot receives new code while docked, installs it, and is ready to resume operation when undocking completes. One docking event. Three functions: charging, calibration, and software deployment. No separate maintenance window required. When the session ends, the robot reverses the sequence: it rises from the squat, walks forward, and resumes operation with a full battery, fresh calibration, and updated firmware [0106]-[0109]. 🎯 Why This Matters Tesla's Q4 2025 earnings update confirmed that Gen 3 Optimus production lines are being installed, with volume production planned before the end of 2026. The Fremont factory is converting Model S and Model X lines to Optimus manufacturing. The target capacity is 1 million units per year. At that scale, charging infrastructure becomes an operations problem. Every minute a robot spends balancing instead of charging is wasted energy. Every calibration session that requires a human technician is a bottleneck. Every software update that takes a robot offline is lost productivity. This patent addresses all three. The structural tab eliminates idle power drain. The autonomous docking sequence removes the need for a human to connect anything. The integrated calibration and update pipeline eliminates separate maintenance downtime. The patent also describes two interface variants. In one, the station carries the structural tab and the robot carries the receptacle. In the other, the robot carries a mating tab that inserts into a channel on the station. This flexibility suggests Tesla is designing for different deployment environments, from factory walls to freestanding stations in warehouse aisles. The claims reinforce this breadth. Three independent claims cover the system, the robot alone, and the charging station alone. If a competitor builds a compatible station for Tesla's robot, the station claim applies. If a competitor builds a robot with a similar receptacle, the robot claim applies. Tesla is patenting both sides of the interface. For a fleet of humanoid robots operating across shifts in a factory, the docking station is not an accessory. It is the infrastructure that determines how many hours per day each unit can work. This patent is Tesla's answer to that constraint 🤔 🖼️ Key Figures [FIG. 1: Full system view showing robot docked with charging station, structural tab engaged with receptacle between shoulder structures] [FIG. 9A: Side view of backward walking docking approach with mating tab variant] [FIG. 5: Docking path showing horizontal approach (20-80 mm) + vertical squatting motion (10-40 mm)] 🗂️ Bibliography Patent No.: WO2026055103A1 Title: ROBOTIC CHARGING SYSTEM, ROBOTIC SYSTEM AND CHARGING STATION FOR STATICALLY STABLE CHARGING OF THE ROBOTIC SYSTEM Assignee: Tesla, Inc. Inventors: Douglas Nordman, Brian Machado, Micah Erickson Filed Date: 2025-09-02 Published Date: 2026-03-12 Priority: US Provisional 63/690,250 (2024-09-03)