Angehefteter Tweet

Has visual fidelity outpaced dynamic fidelity in tactile simulation for sim-to-real transfer of policies?
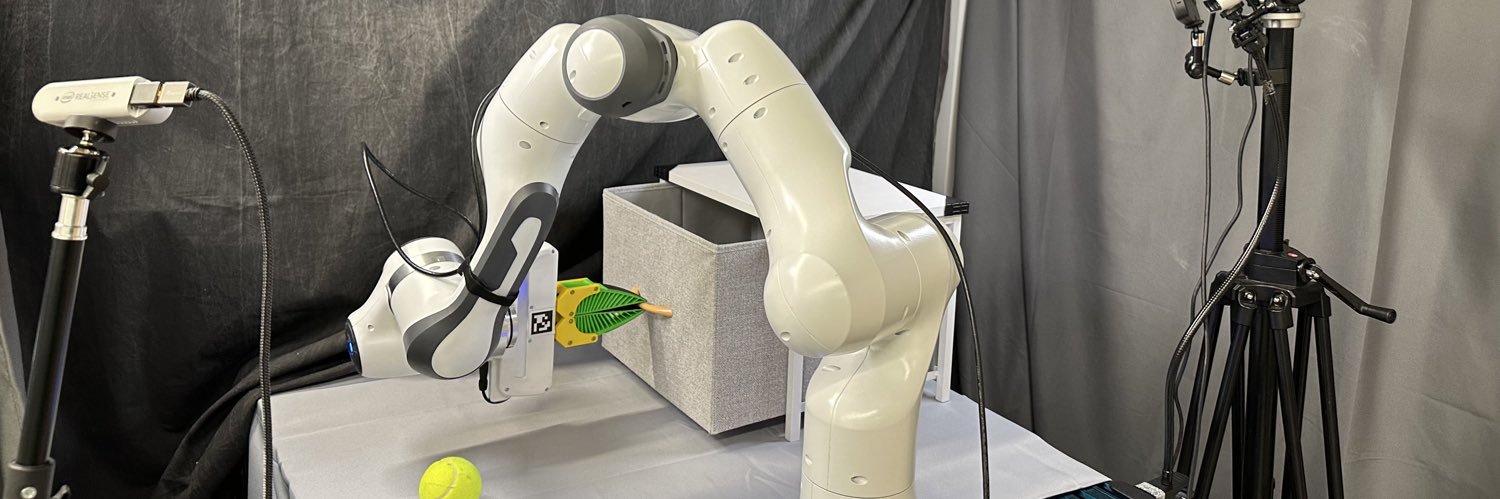
Introducing HydroShear 🏄♂️ : a hydroelastic tactile shear simulation for training zero-shot sim-to-real tactile policies in contact-rich tasks where fingertip force and shear matter most!
Webpage: hydroshear.github.io
Robot videos in 1x 🧵👇
English