Abhishek Cauligi retweetledi

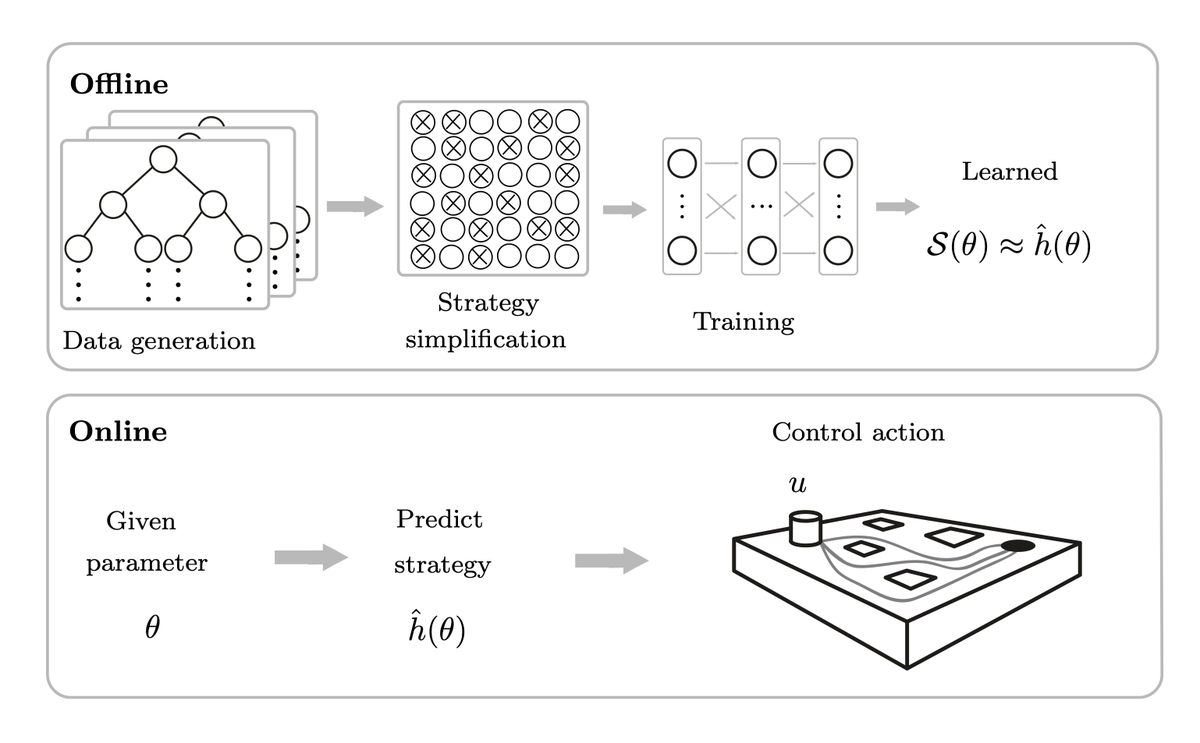
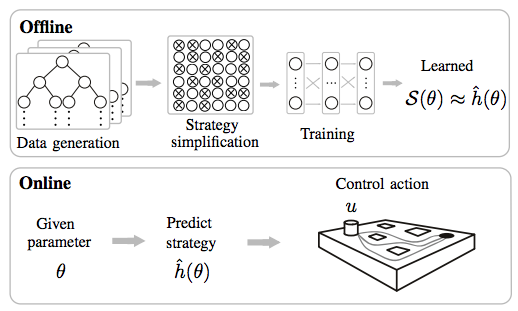
🚀 First demonstration of learning-accelerated trajectory optimization in space! Our team used a neural network to warm-start trajectory optimization for the @NASA's Astrobee free-flying robot on-board the @Space_Station, cutting solver iterations by up to 60% while maintaining safety constraints.
🎥 Video: youtu.be/NVDMd88XFhs
📄 Paper: arxiv.org/abs/2505.05588
📅 Submitted to iSpaRo 2025
With @SomritaBanerjee and @ACauligi
YouTube
English